ZMR250. Компоновка гоночного квадрокоптера
В этой статье мы хотим поделиться тем как установлены элементы систем нашего гоночного квадрокоптера, а также выложим все исходные файлы проекта для кастомизации.
Еще раз обращу внимание на то, что мы не будем подробно останавливаться на подключении и настройке коптера. Частично это было рассмотрено в предыдущей статье. Здесь мы предложим вариант сборки летающего аппарата, который позволяет сэкономить вес и повысить защищенность комплектующих.
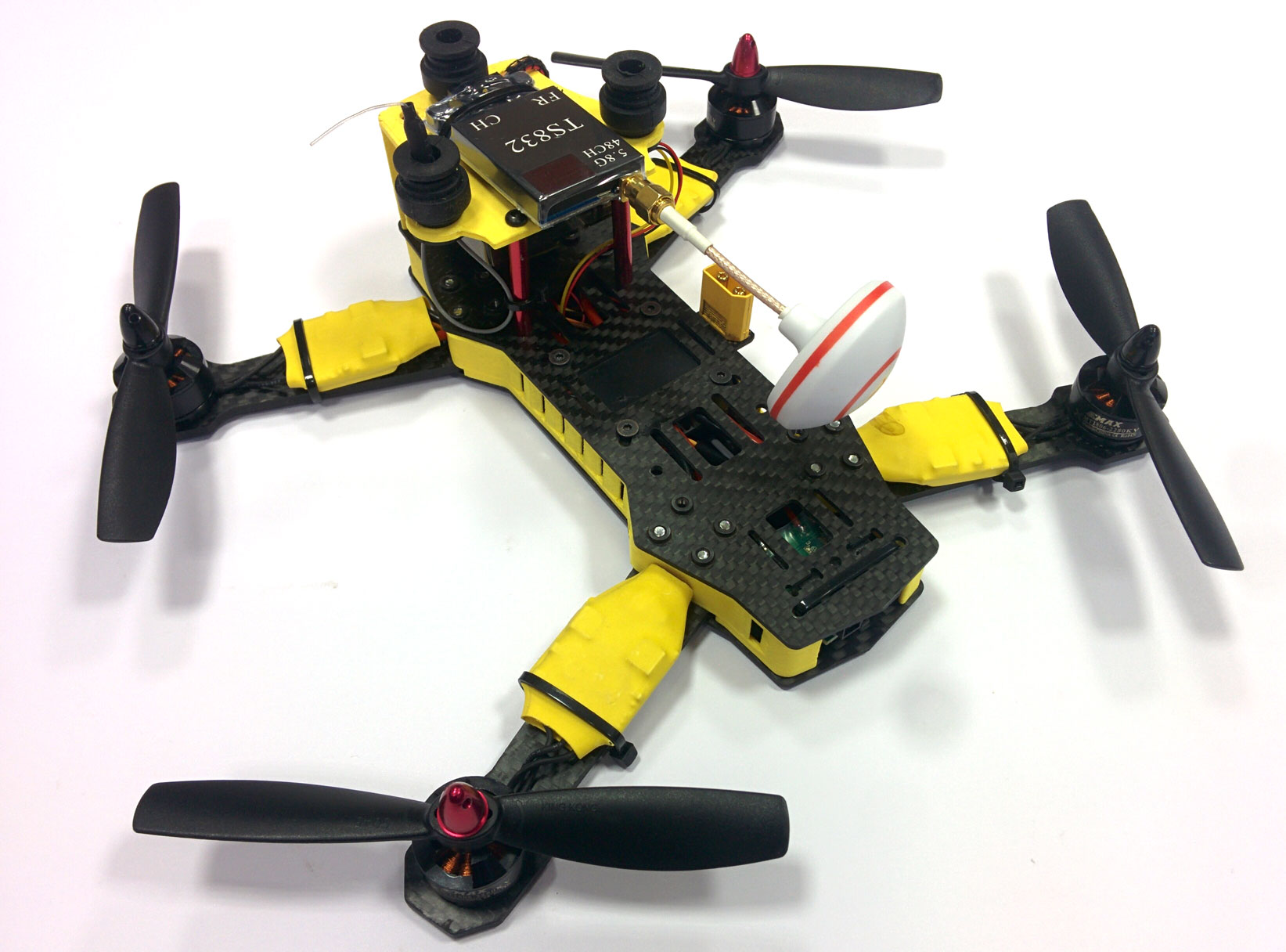
Сейчас наш коптер выглядит вот так:

ZMR250 в сборе
Спэйсер
Самая простая компоновка коптера предполагает расположение всех элементов на нижней палубе аппарата, а аккумулятора на верхней. Это очень простой вариант с одной стороны, но с другой это ухудшает управляемость и делает эксплуатацию коптера очень опасной. Наш коптер был собран также до некоторого времени. Посмотреть как это выглядело можно здесь.
Многие стараются уйти от такого расположения элементов. Электроника убирается внутрь тушки аппарата на уровне лучей, а аккумулятор ставится на "первом этаже". Для этого необходимо напечатать вот такую проставку:
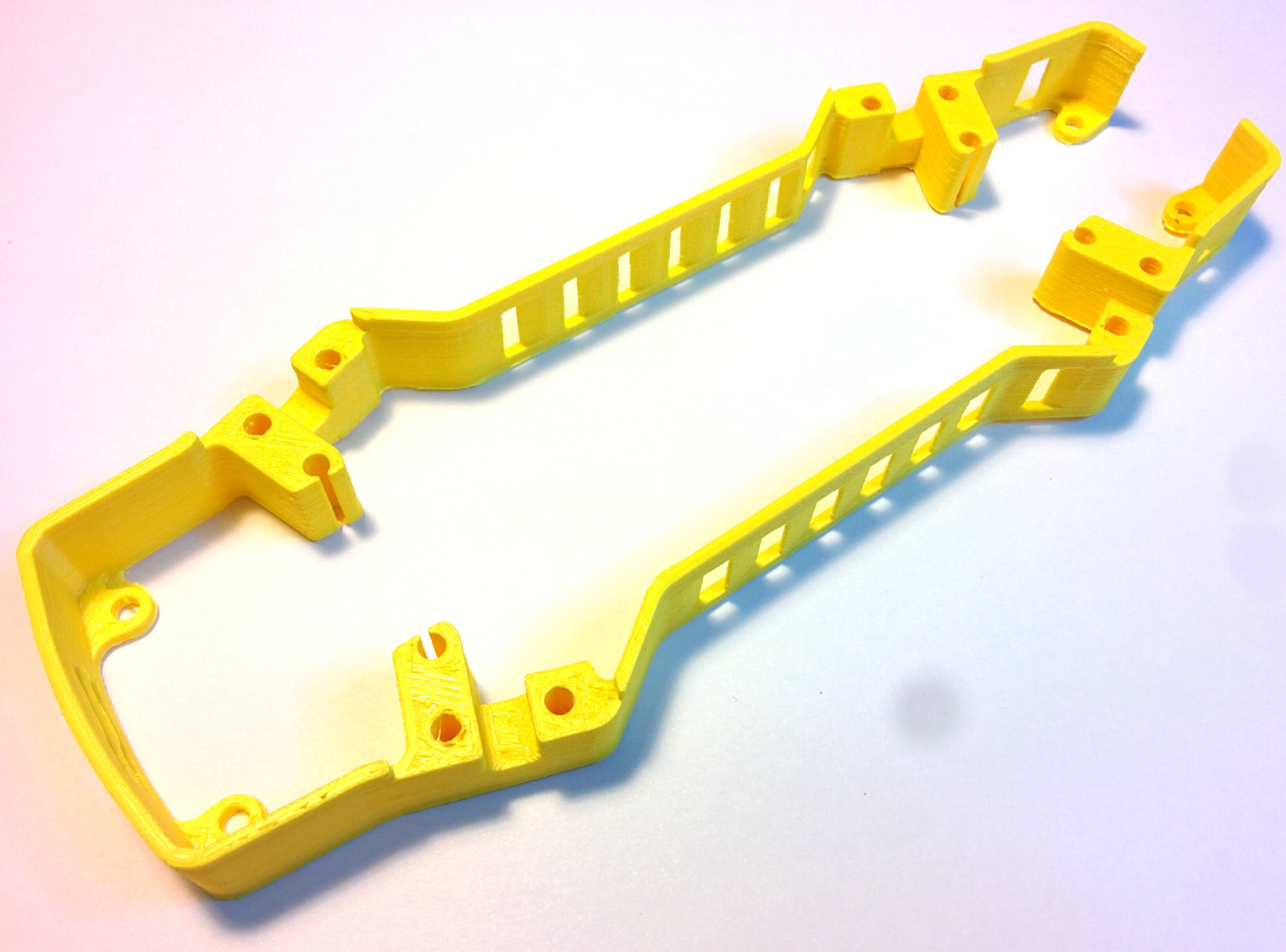
Spacer
Мы немного доработали ее чтобы облегчить и сделать больше места во внутренней части. В конце статьи вы найдете файлы для печати и исходные файлы, которые позволят изменить ее под ваши нужды в программе SketchUp.
Обычно всю электронику устанавливают на дно, но наоборот поставили все вверх ногами. На полностью собранном коптере это позволяет просто снять нижнюю крышку и получить доступ ко всей электронике.
Итак, на следующем этапе прикручиваются все лучи и одна из палуб:
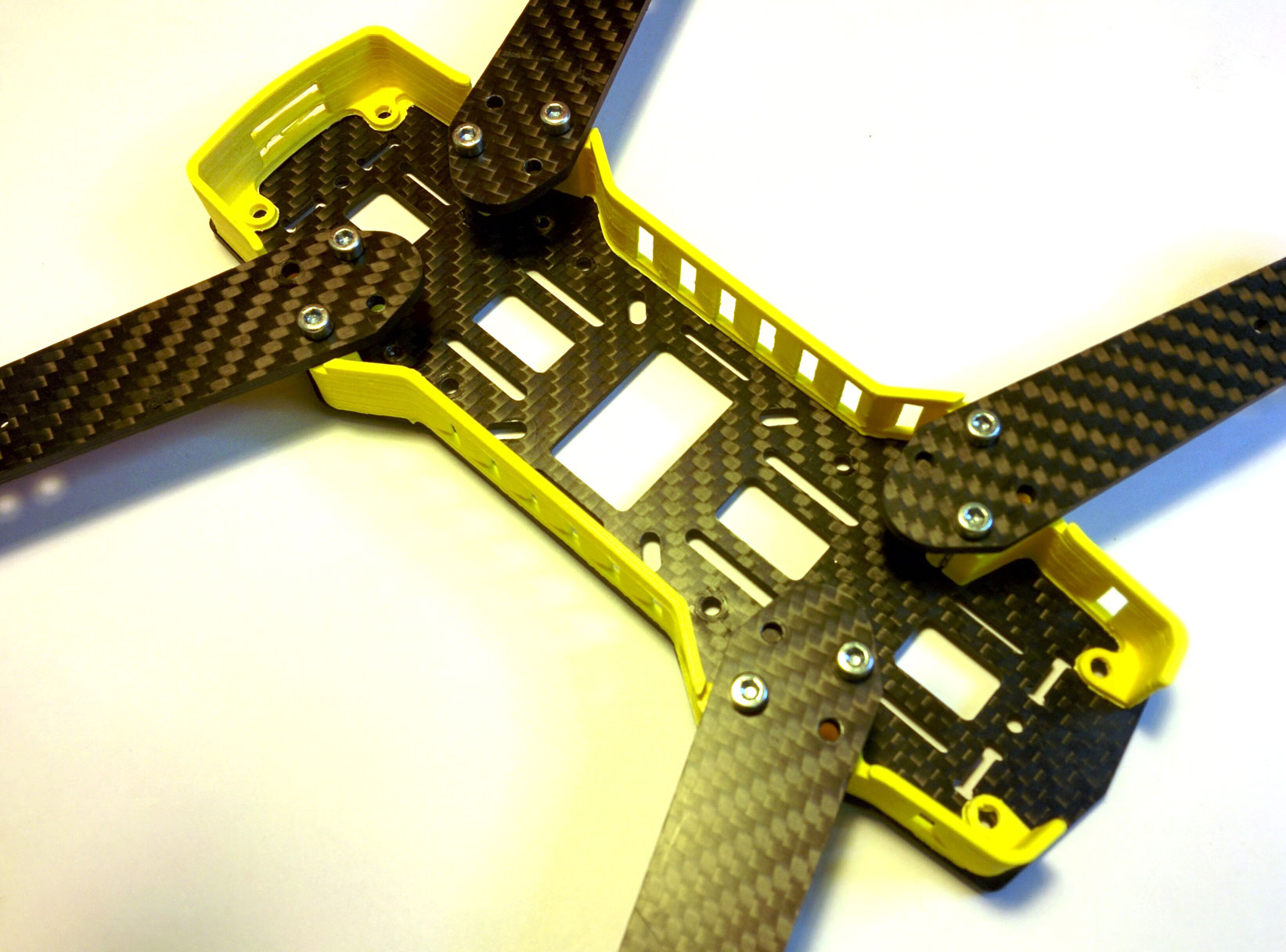
Сборка рамы
Подключение ESC
Теперь уже можно установить регуляторы на лучи и двигатели:
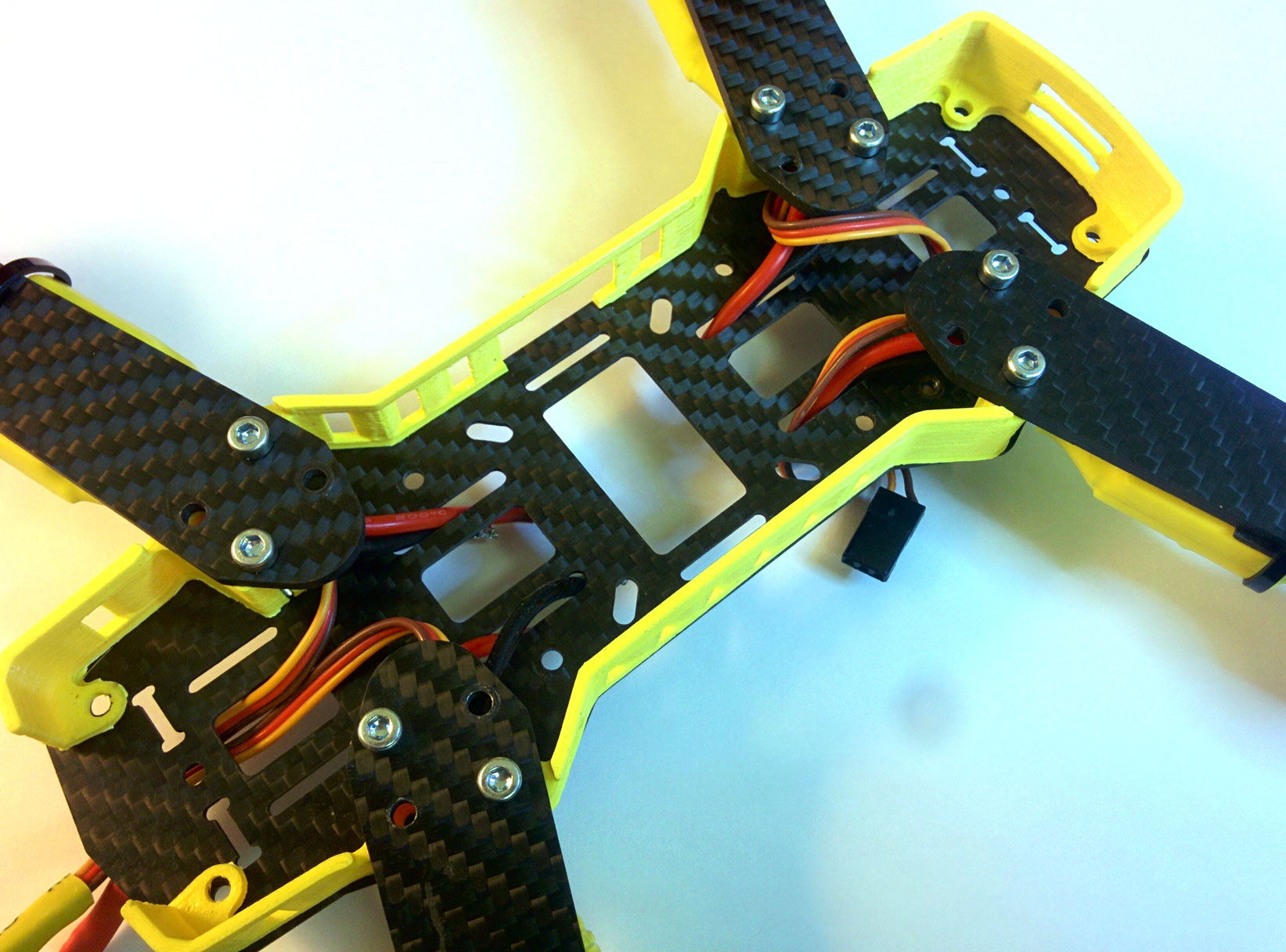
Установка ESC
Для организации системы питания мы приобрели вот такую вот плату. Ее нижнюю часть мы обклеили изолентой:
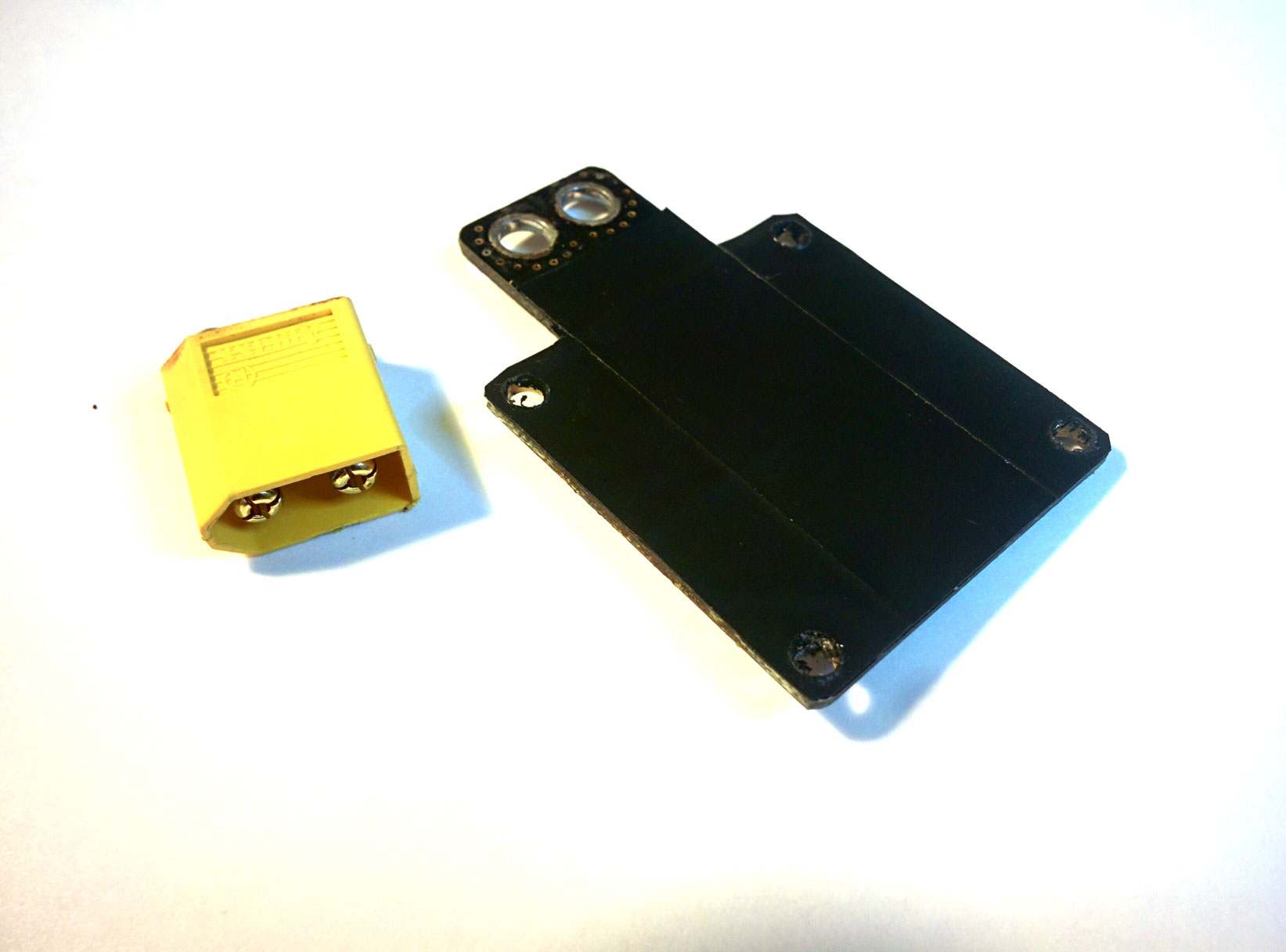
Плата распределения питания
Далее она прикручивается к раме так, чтобы разъем в последствии торчал вверх и сразу припаяли провода питания ECS:
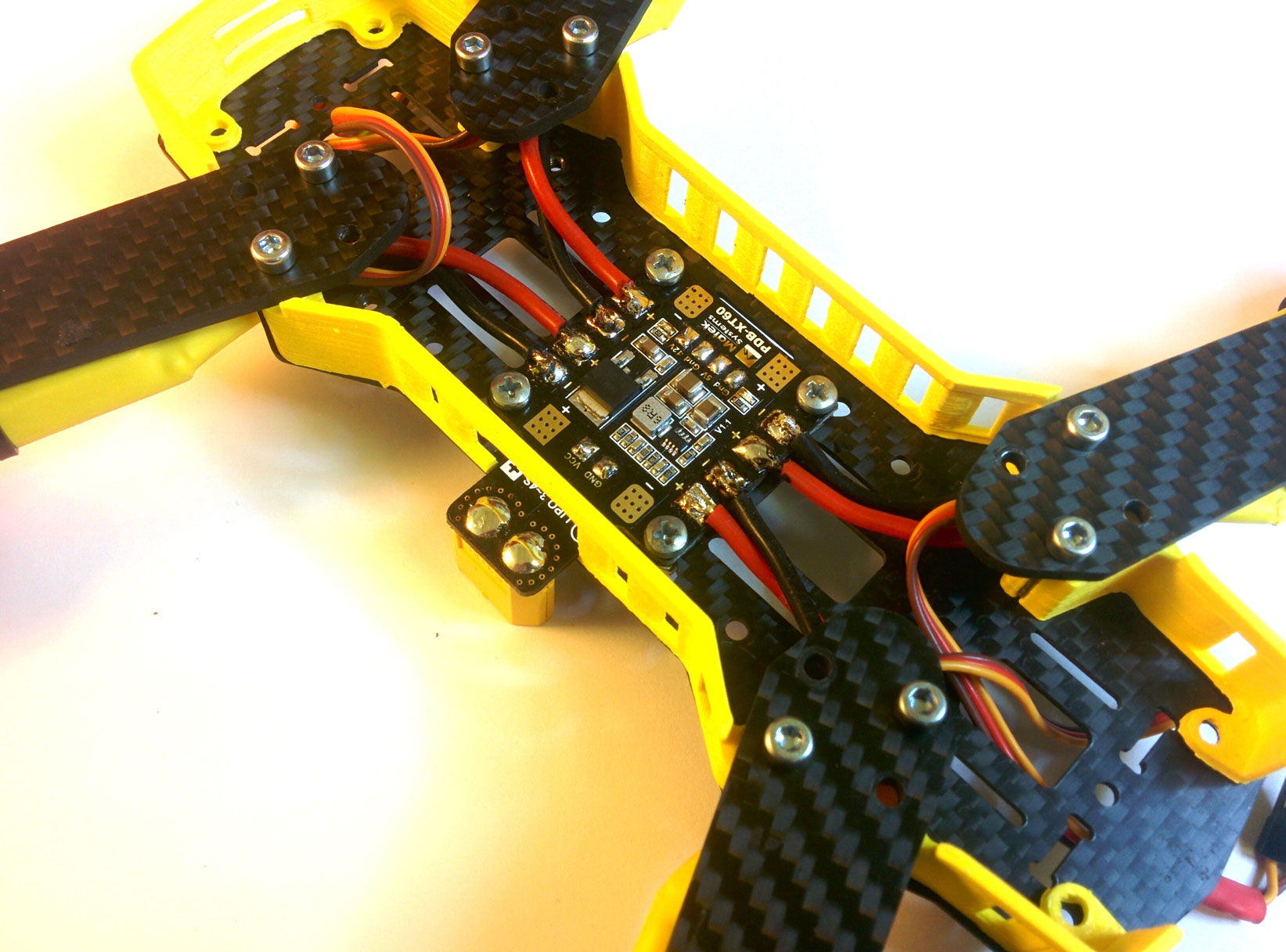
Установка платы распределения питания
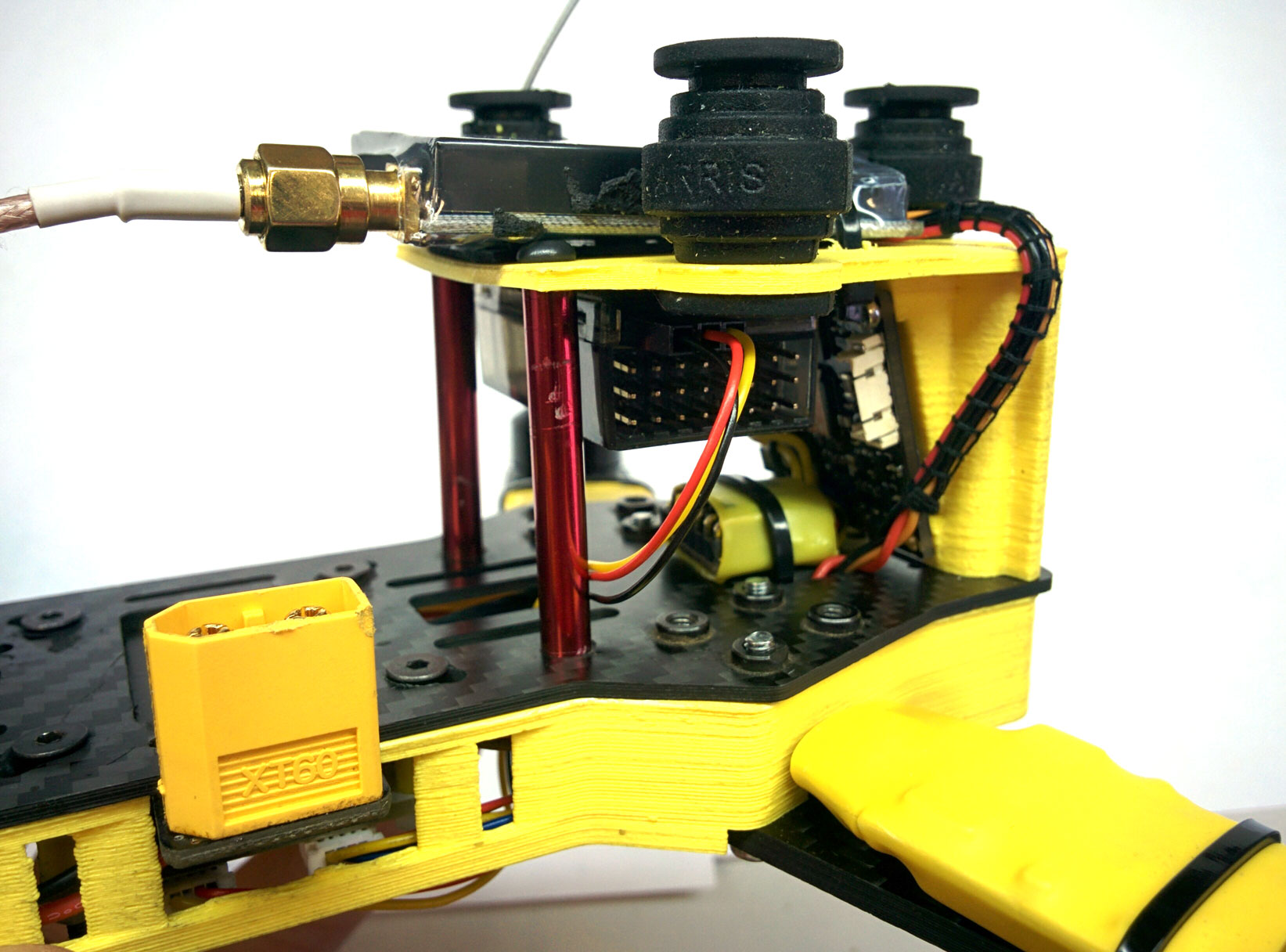
Установка FPV
Для установки камер на переднюю часть нашего коптера установлена вот такая деталь:

Крепление камер
Для защиты от вибрации используются эти прокладки. Передатчик установлен у нас между FPV и пишущей камерой:
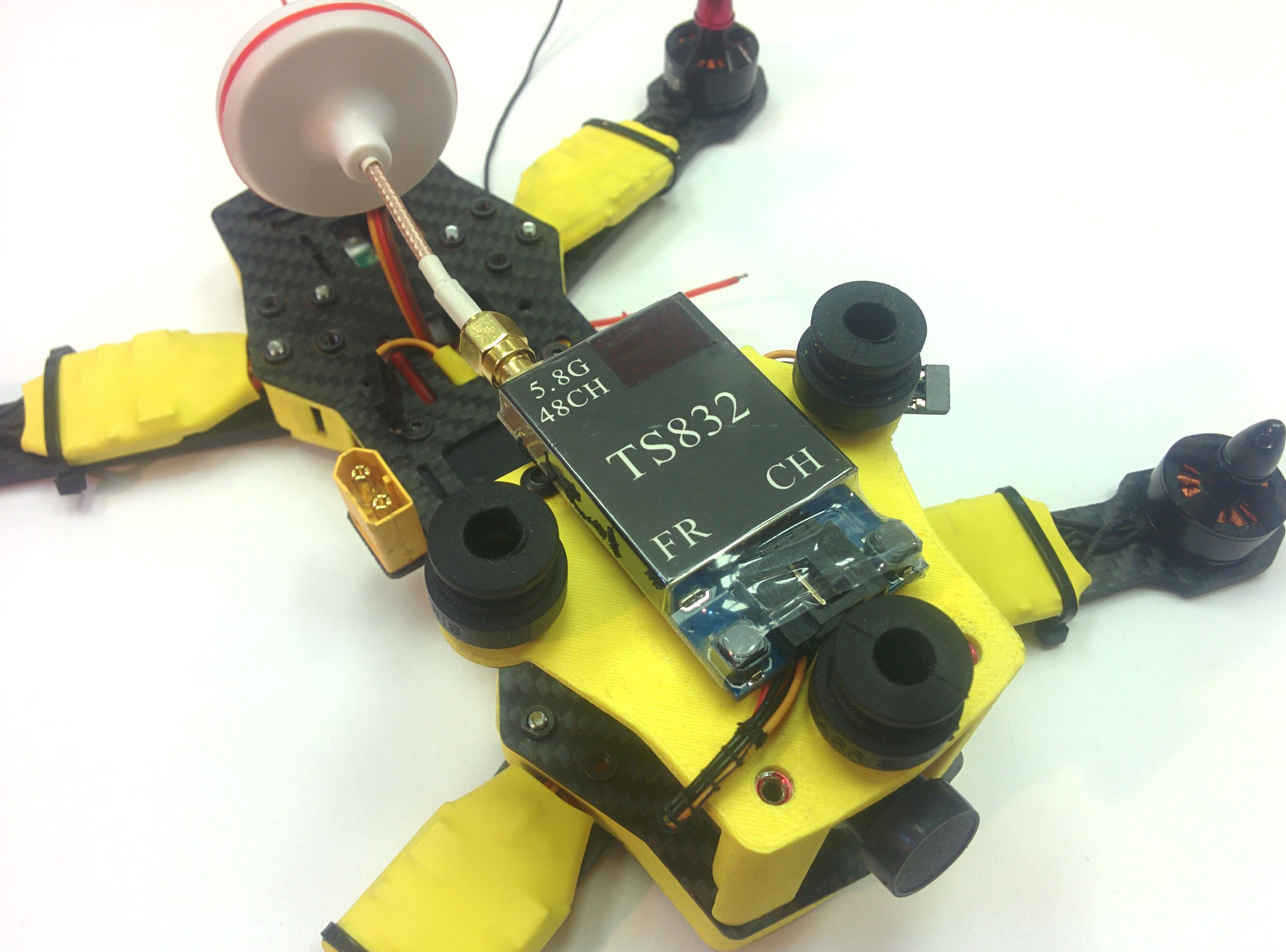
Установка передатчика
Для него мы докупили альтернативные антенны.
FPV-камера и плата OSD установлены с обратной стороны:

FPV-камера и OSD
Далее провода от этих устройств устройств приходят в нижнюю часть коптера для подключения к PDB и полетному контроллеру. Также в нижней части коптера установлен сигнализатор для обнаружения аппарата.
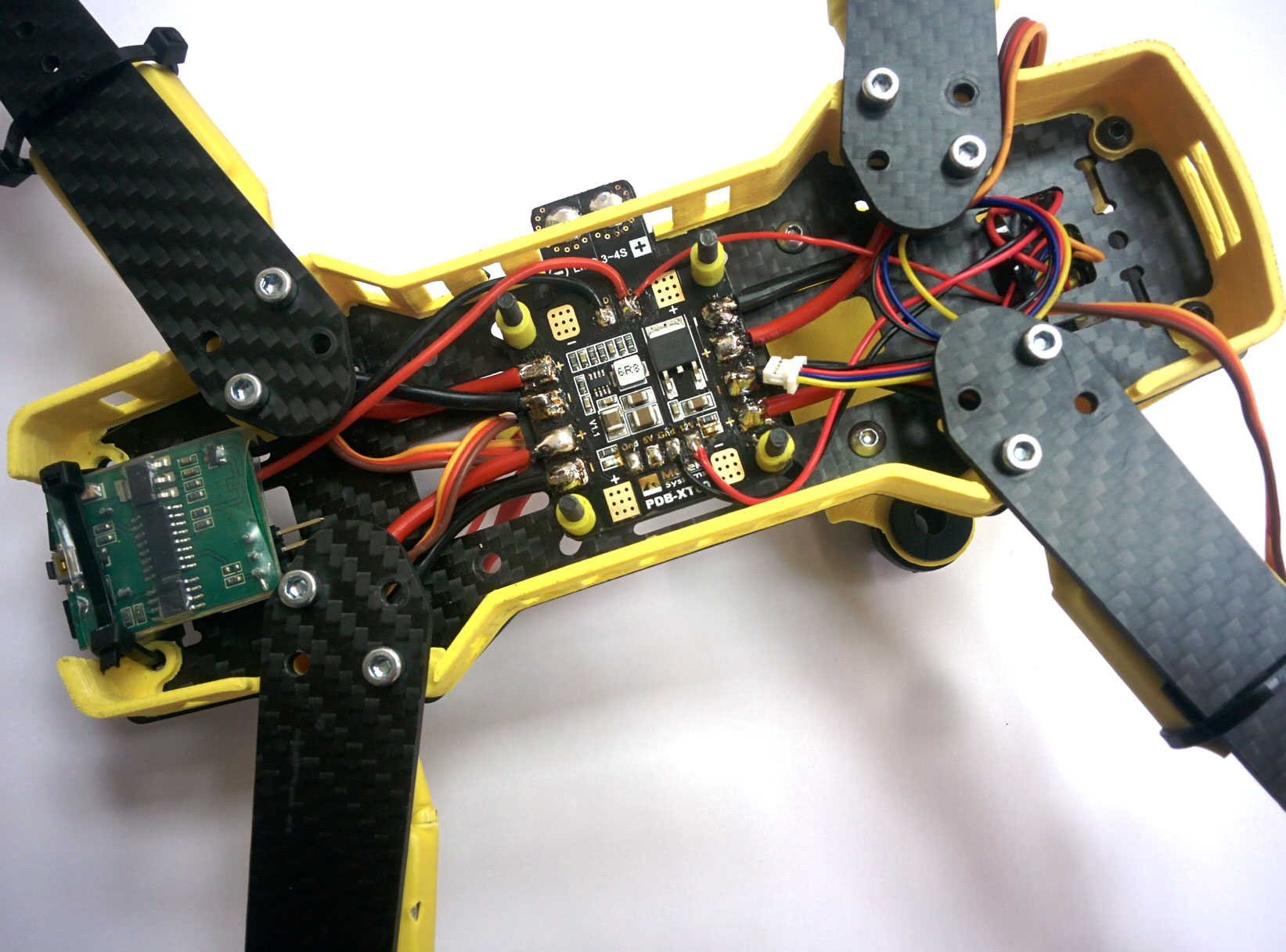
Подключение элементов
Полетный контроллер и приемник
Полетный контроллер устанавливается в последнюю очередь над платой распределения питания:
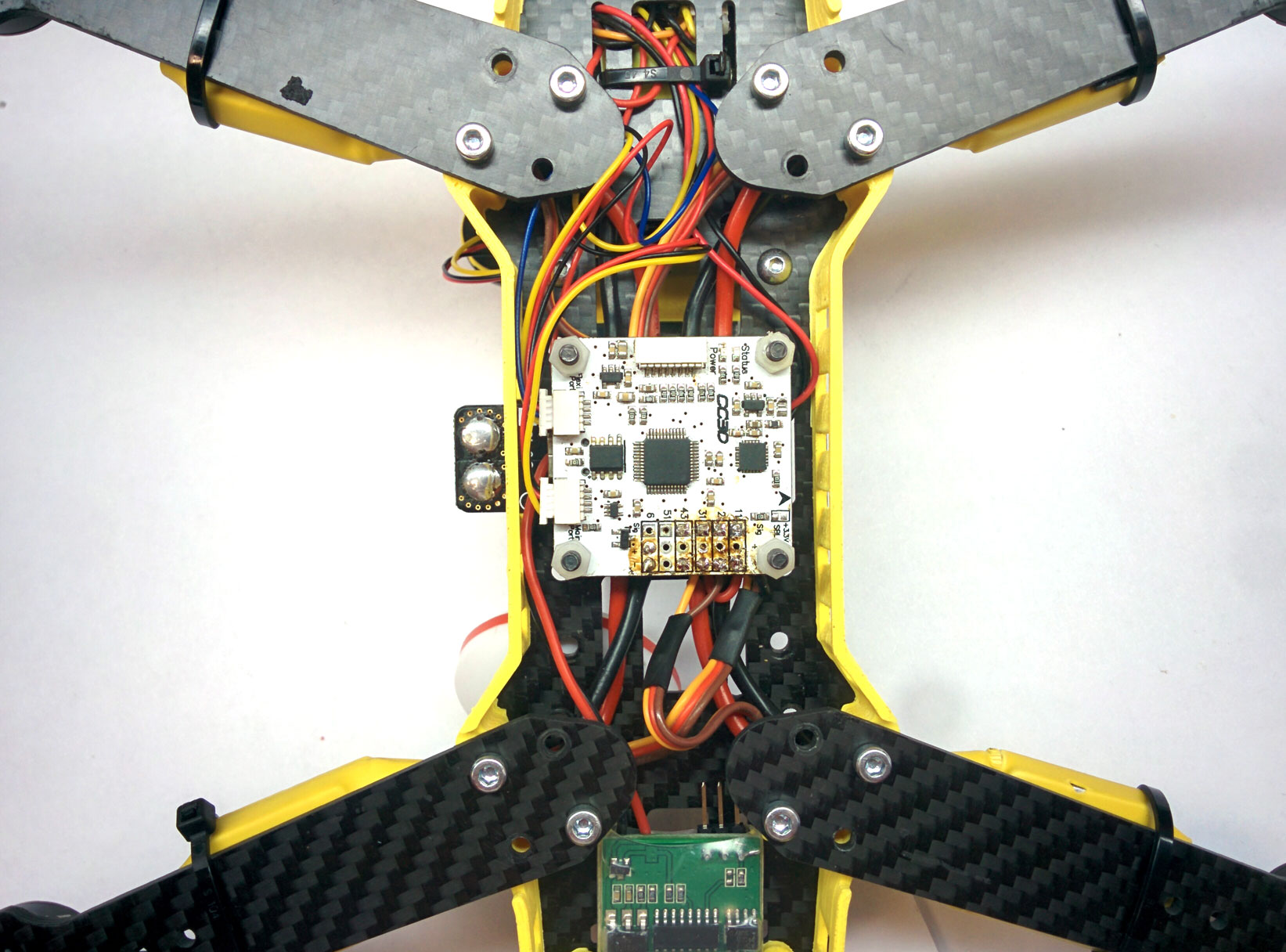
Установка полетного контроллера
При этом USB-разъем в удобном доступе для подключения и настройки.
Для управления коптером мы приобрели RadioLink AT9. Его приемник можно разместить внутри рамы, но мы решили что лучше оставить его снаружи для облегчения обслуживания.
Установка приемника
Теперь, когда все подключено можно закрывать нижнюю крышку:

С нижней крышкой
Для приема видео сигнала мы приобрели очки Eachine VR-007.
Еще фото



Видео
Файлы для скачивания
Спэйсер
Передняя часть
Держатель для GoPro
Исходные файлы моделей
Мы будем очень рады, если вы поддержите наш ресурс и посетите магазин наших товаров shop.customelectronics.ru.
Метки: 3Dprint, drone, droneracing, FPV, SketcUp, ZMR250, гоночный, Квадрокоптер, коптер Просмотров: 6976