Гоночный квадрокоптер своими руками за $67 на раме ZMR250
На сегодняшний день в интернете очень много информации о том, как из каких комплектующих и как собрать гоночный квадрокоптер, но вся она перегружена деталями и, на мой взгляд, может только отпугнуть новичка. В этой статье мы хотим описать инструкцию по "быстрому старту" и помочь желающим начать летать здесь и сейчас с минимальными затратами.
В статье речь пойдет о сборке квадрокоптера из простого набора комплектующих, купленных на aliexpress. Базовый комплект с минимальными характеристиками на сегодняшний день действительно стоит менее $70 и в последствии его можно будет продолжать улучшать, докупая комплектующие. Помимо самого набора, понадобится еще аккумулятор и аппаратура радиоуправления, которые уже есть у многих. А даже если их нет, то купив аппаратуру РУ И аккумуляторы вы можете использовать их не только для квадрокоптера.
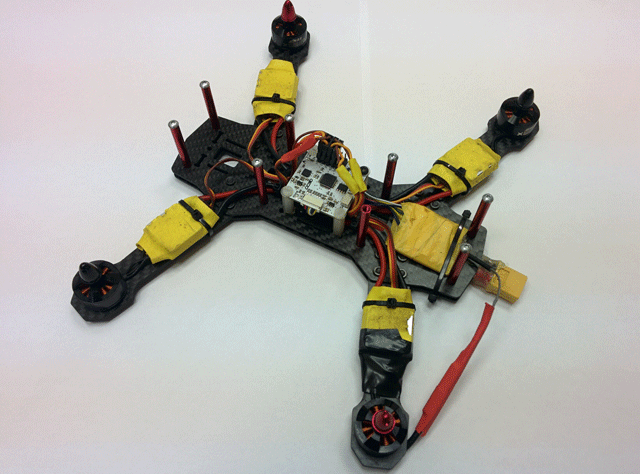
На момент написания статьи наш коптер выглядит вот так:
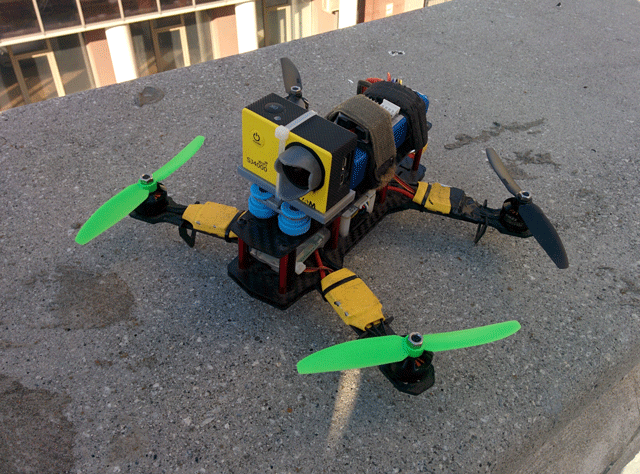
Квадрокоптер на раме ZMR250
Особенности гоночных квадрокоптеров
Это совершенно отдельный класс летающих аппаратов. К их основным особенностям можно отнести:
- Небольшие размеры. Название ZMR250 означает, что у диагональный размер аппарата 250мм. Вес без аккумулятора и камер около 370 грамм
- Минимальная активная стабилизация
- Нацеленность на агрессивную манеру управления и постоянное движение, а не зависание на месте
- Может нести аппаратуру FPV и пишущую экшн-камеру
- Прочная конструкция, рассчитанная на множественные падения
С инженерной точки зрения он достаточно прост и предоставляет максимум контроля пилоту. Он плохо подходит для того, чтобы ставить рекорды дальности, длительности или высоты полетов. Зато из него получается отличная игрушка, которая позволит вам тренировать свои навыки пилотирования.
Обязательные комплектующие
В первую очередь это сама рама, комплект винтомоторных групп и полетный контроллер. Я действительно считаю, что на начальном этапе проще купить готовый комплект и для новичка (то есть для меня) это самый правильный путь. Я взял самый дешевый набор, который нашел на aliexpress.
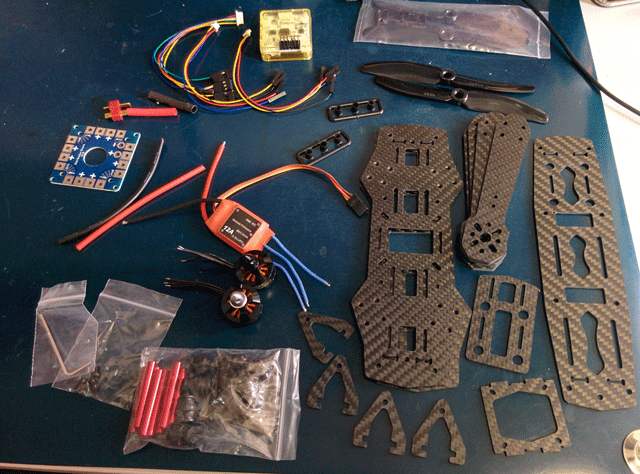
Кмоплектующие для постройки гоночного коптера
Также потребуется аккмуляторное хозяйство с которым основная сложность. Для полетов потребуются литий-полимерные аккумуляторы. Двигатели из комплекта потребляют не очень много и нам вполне хватает аккумуляторов 2200мАx, 3S, 20-30C. Если у вас уже есть подобные аккумуляторы, то можно не покупать другие. Если у вас нет никаких, то на алиэкспрессе купить их будет трудно. Я бы рекомендовал приобретать аккумуляторы у проверенных поставщиков. Например, вот эти.
К ним потребуется специализированный зарядник. Самый народный — iMAX B6. Обратите внимание, что он питается не от сети, а от блока питания 12В. Также потребуется недорогой тестер для контроля состояния аккумуляторов.
Траты на аккумуляторы и зарядник это отдельная статья. Они смогут долго вам прослужить, а хорошее зярядное устройство без труда сможет заряжать многие типы аккумуляторов, а также производить замеры емкости и делать циклические тренировки.
Следующий отдельный пункт затрат это аппаратура радиоуправления. Если ее у вас нет, то проще сразу покупать комплект, в который уже входит аппаратура управления. Например, вот этот.
Если все-таки хотите купить отдельно, то большой популярностью пользуются Radiolink и FrSky, благодаря отношению цена/качество. Мы используем радиоаппаратуру Turnigy 9x.
При падениях эти коптеры почти не страдают, кроме винтов. Винтов надо много и сразу. Мы использовали вот эти.
Сборка квадрокоптера
В первую очередь необходимо собрать раму. Даже на общих планах очевидно, что собирается она очень просто.
Далее следует установить двигатели и регуляторы оборотов. Сначала посмотрите как они должны быть установлены в конечном итоге, а затем приступайте к установке моторов. "Перед" коптера в верхней части снимка.
Коптер с установленными двигателями и ESC
Самое главное, что видно на этой фотографии это то, что левый передний и правый задний двигатель должны вращаться по часовой стрелки (они будут обозначены черными гайками зажима винтов). Правый передний и левый задний двигатели должны вращаться против часовой стрелки и у них будет серебристая гайка. У этих гаек, кстати, направление резьбы препятствует их раскручиванию.
Теперь поговорим подробней о подключении двигателей.
Сделать все это можно по-простому, спаяв провода моторов и регуляторов хода (ESC), но мы решили укоротить их. Для этого сначала снимается термоусадка со всех регуляторов.
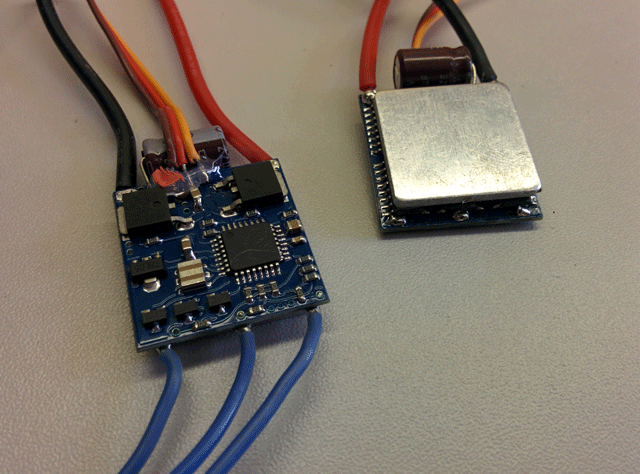
ESC без термоусадки
На одной стороне сам контроллер, а на другой стороне ключи с радиатором. Штатные провода мы отпаяли, обрезали провода двигателей на нужную длину и затем запаяли их на плату.
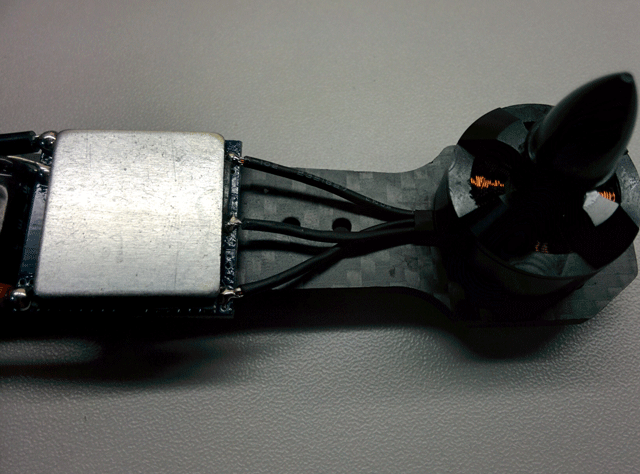
Подключение ESC к двигателю
В этот момент необходимо проверить, что подключенный двигатель крутится действительно в правильном направлении. Вот как это сделать:
- Снимите с двигателя винт, если он был установлен!
- Рама проводит ток, поэтому обеспечьте изоляцию ESC от рамы
- Подключите регулятор оборотов к каналу газа приемника системы РУ и включите пульт
- Опустите стик газа в нижнее положение
- Подключите питание ESC, соблюдая полярность
- Добавляйте понемногу газ, пока двигатель не начнет крутиться
- Если двигатель крутится не в ту сторону, то необходимо поменять местами два любых провода двигателя
После того, как работоспособность двигателя проверена, можно надевать на регулятор оборотов термоусадочную трубку.
Пара установленных ESC
Обратите внимание, что мы не стали использовать плату распределения питания из комплекта. У нас был в запасах тонкий фольгированный стеклотекстолит, из которого мы вытравили простую коммутационную плату.
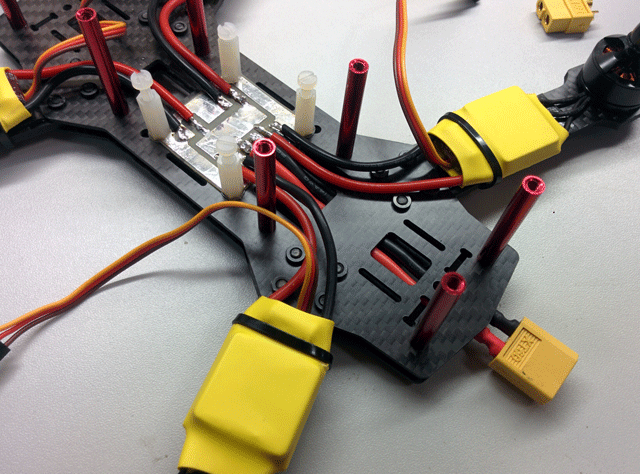
Простая лата распределения питания — PDB
На этой плате должны соединяться все плюсовые и минусовые провода регуляторов оборотов с плюсовыми и минусовыми проводами разъема аккумулятора соответственно. Эту плату необходимо изолировать и мы сделали это при помощи обычного лака для ногтей:

Изоляция PDB
Приемник нашей аппаратуры достаточно большой:
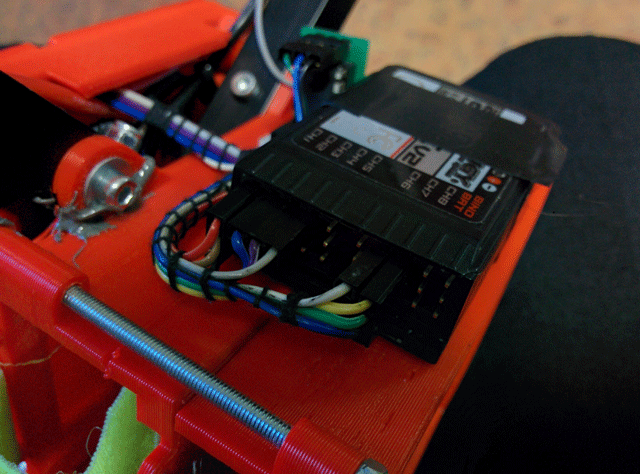
Приемник аппаратуры радиоуправления Turnigy 9x
Мы решили снять с него корпус, отпаять от него старые провода и припаять провода от двигателя напрямую к плате. На первых шагах проще этого не делать, чтобы не допустить лишних ошибок. Теперь мы готовы установить полетный контроллер и подключить к нему регуляторы оборотов с приемниками. При его установке обратите внимание внимание на стрелочку, указывающую напрвление "вперед".

Установка полетного контроллера CC3D
Порядок подключения каналов к приемнику не имеет значения, это можно (и нужно) будет указать позже, при настройке. Важно только правильно подключить питание приемника. В комплекте с полетным контроллеров прилагается кабель с разъемом для приемника. В этом кабеле первый провод должен быть черным и его следует подключить к минусу питания приемника. Второй кабель красный и его надо подключить с плюсу питания приемника. Остальные провода просто подключите по порядку ко всем каналам приемника (минимум к первым четырем).
Перед подключением регуляторов необходимо сделать еще одно. В эти регуляторы встроены стабилизаторы для питания полетного контроллера и не нужно подключать все их сразу. Надо выбрать один и оставить его разъем подключения к контроллеру без изменения, а на всех остальных извлечь средний провод и изолировать его. Посмотрите как это сделано на фото выше.
Регуляторы оборотов подключаются очень просто. Левый передний к первому каналу, а дальше по часовой стрелке: правый передний ко второму, правый задний к третьему и левый задний к четвертому.
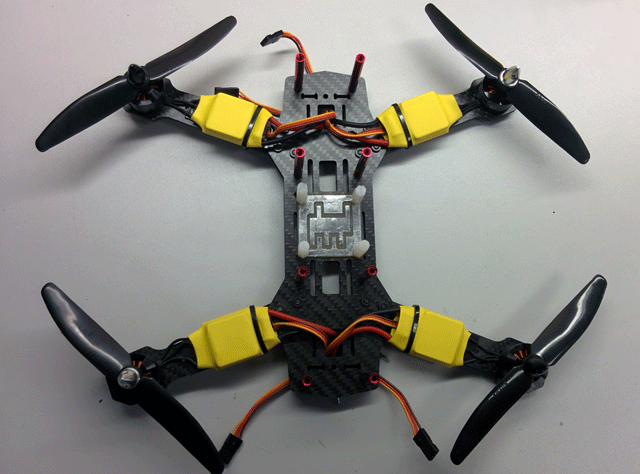
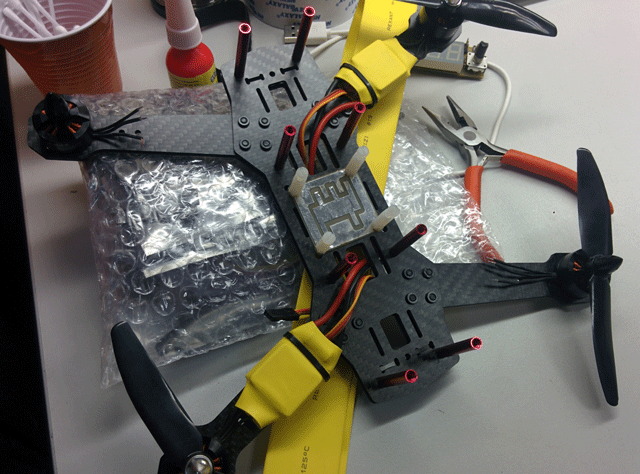
Теперь все необходимые элементы собраны воедино:
ZMR250 без верхней части рамы
Осталось только надеть верхнюю крышку. Мы сразу распечатали держатель камеры для нашей SJ4000. Силиконовые демпферы обязательно надо дублировать хомутами, иначе камера слетит с коптера при падении.
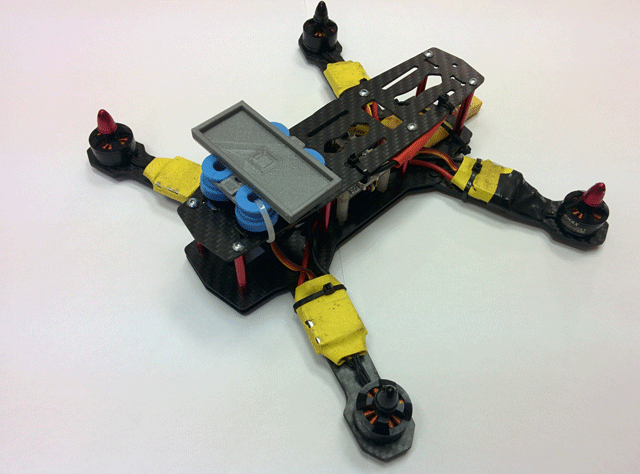
ZMR250 в сборе
Настройка
Вот в этот момент начинаются некоторые проблемы. На данный момент полетный контроллер CC3D перестал поддерживаться, а родная утилита OpenPilot перестала развиваться. Строго говоря, коптеры на базе полетных контроллеров типа Naze, с этой точки зрения на данный момент более выгодны.
Но даже этот контроллер CC3D все-таки без проблем получится настроить при помощи программы Libre Pilot. При подключении к компьютеру на Windows драйверов никаких не потребуется.
Снимите с коптера винты и не подключайте аккумулятор. Подключать к компьютеру тоже пока не надо. Запустите программу:

У этого полетного контроллера относительно много возможностей, но мы не будем сейчас в них вдаваться. Наша задача как можно скорее получить летающий аппарат. Для этого проще всего пройти по шагам помощника настройки, так что кликаем правую верхнюю иконку "Vehicle Setup Visard" и видим снова предупреждение:
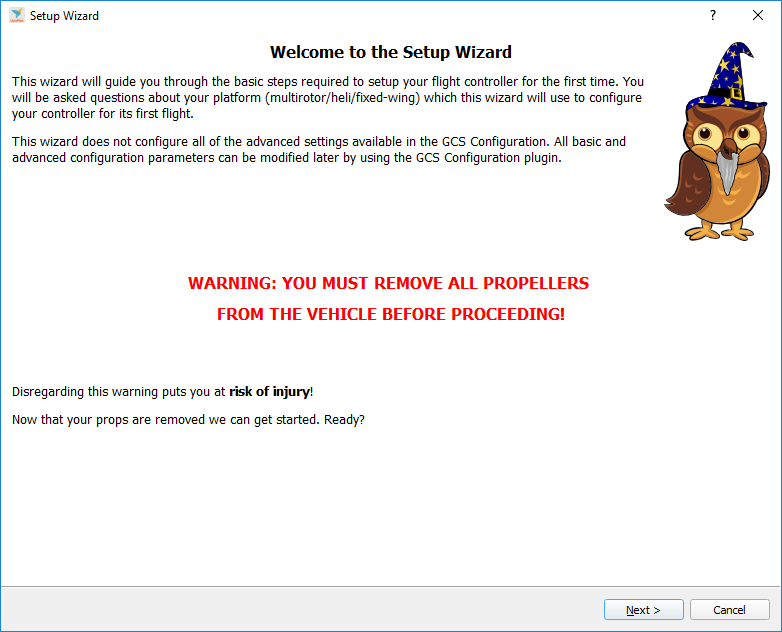
Еще раз проверяем, что пропеллеры не установлены и кликаем "Next".
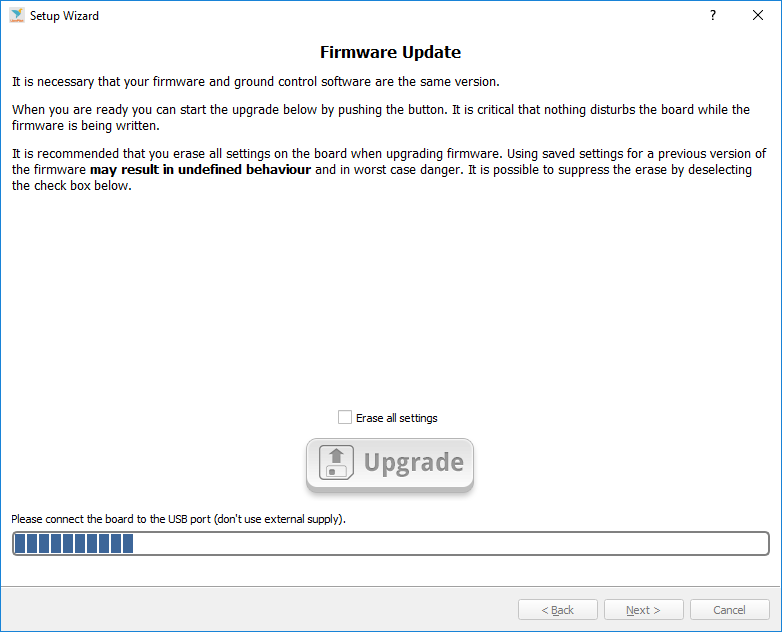
Система предложит нам подключить контроллер по USB и обновить встроенное ПО контроллера. Сделайте это.
На следующем этапе указываем свой тип аппаратуры. В нашем случае это "PWM". Выбираем первый пункт и следуем далее.

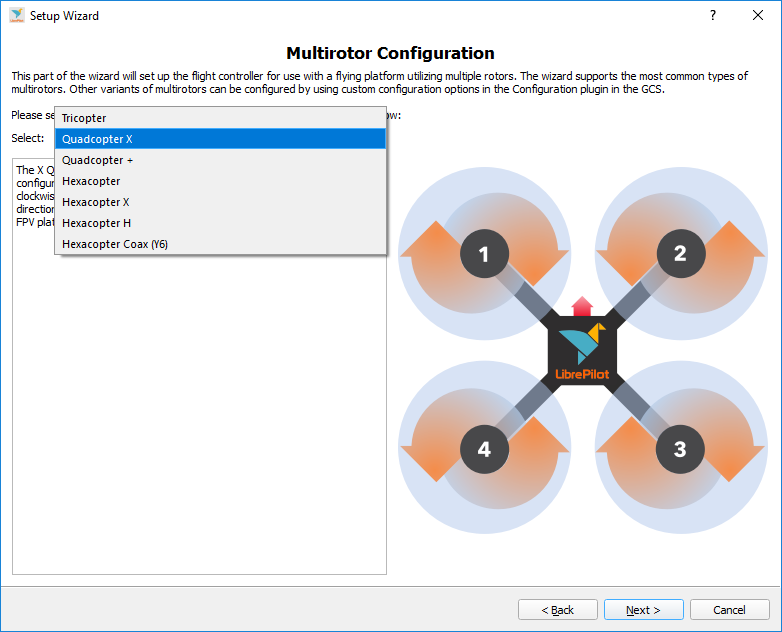
Теперь указываем тип нашего летательного аппарата:

Далее указываем тип мультироторного летающего аппарата:
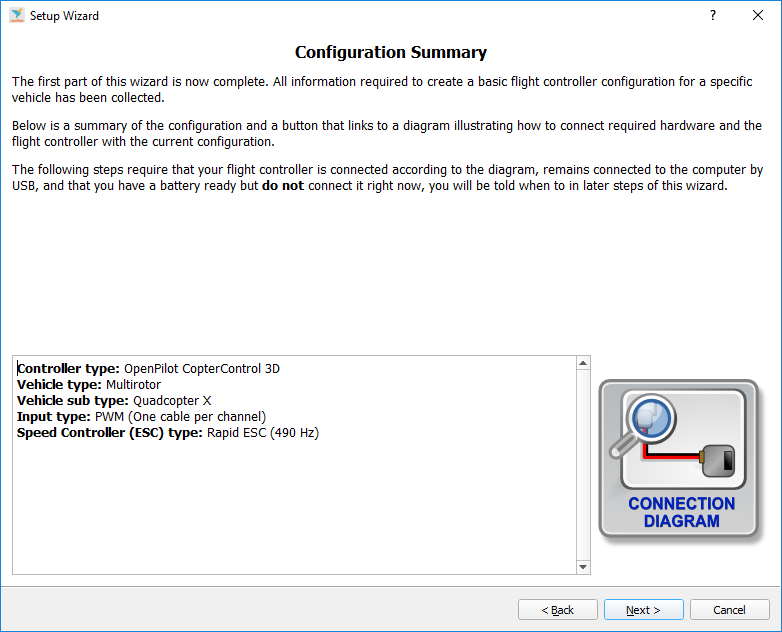
На следующем этапе следует указать тип сигнала для регуляторов оборотов. В моем наборе были регуляторы с частотой, повышенной до 490Гц.

На следующем этапе убедитесь, что корректно указали все данные и нажмите "далее".
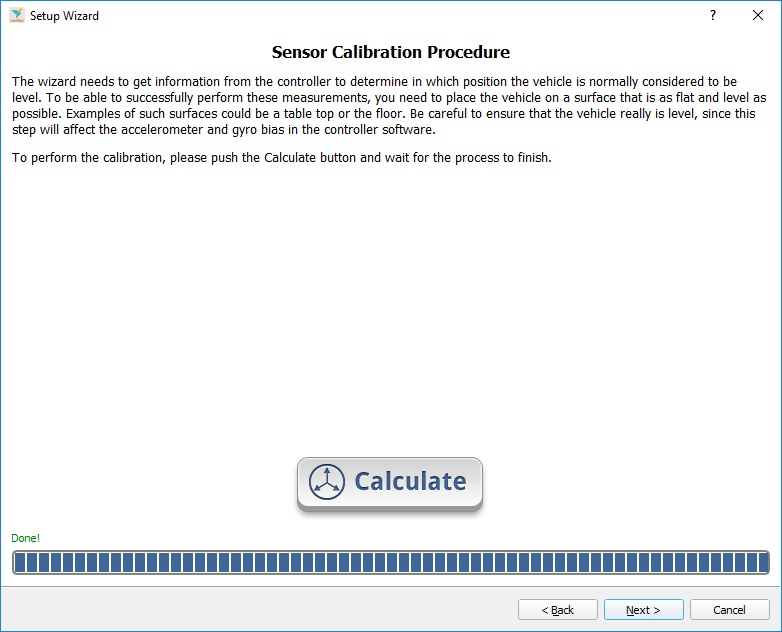
Теперь необходимо выполнить процедуру калибровки сенсоров полетного контроллера. Положите коптер на ровную поверхность и нажмите "Calculate". Во время калибровки обеспечьте неподвижность коптера.
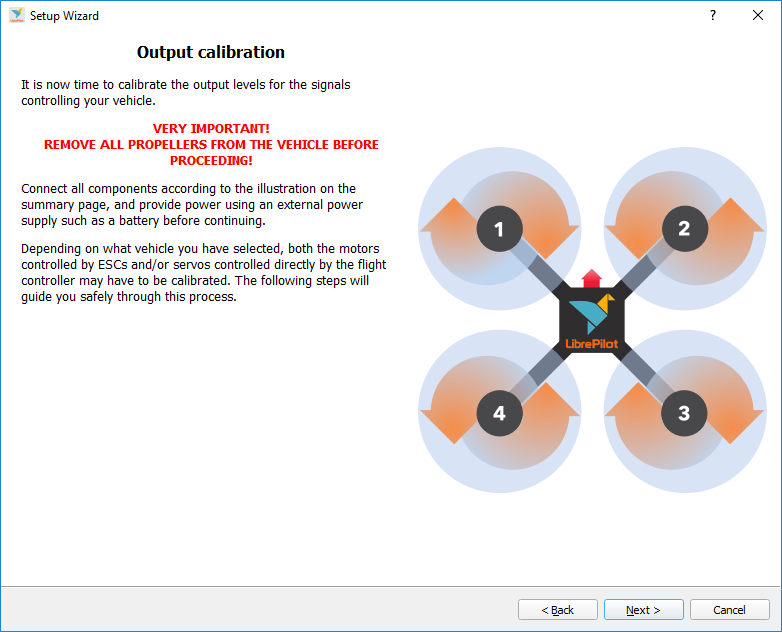
На следующем этапе вас просят убедиться, что все винты сняты, а аккумулятор отключен.
Нажмите "Start", подключите аккумулятор, дождитесь, пока двигатели пропищат, отключите аккумулятор, нажмите "Stop", снова дождитесь звукового подтверждения от двигателей и отключите аккумулятор. Далее жмем "Next".

Опять напоминание про винты и то, что аккумулятор должен быть отключен.
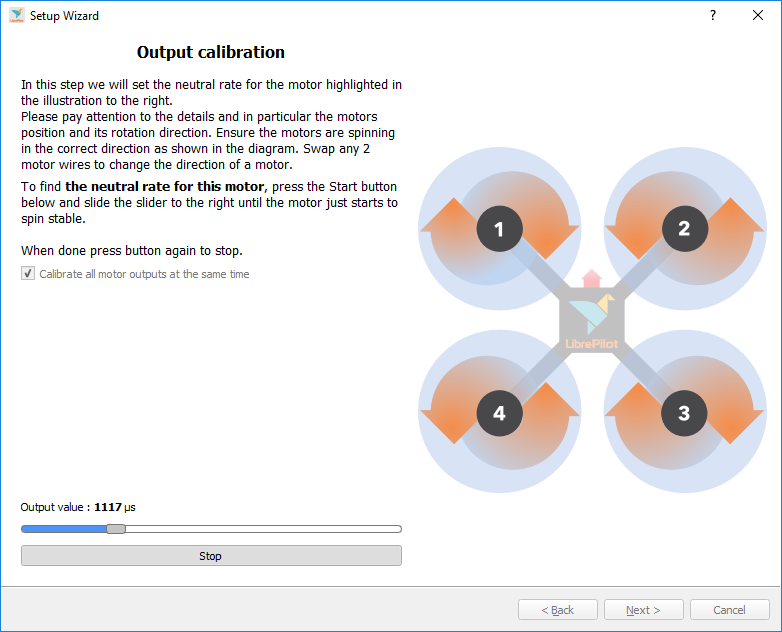
Нажмите "Next" и начнется настройка сигнала управления двигателями. Нажимаем "Start", подключаем аккумулятор и двигаем ползунок в левой нижней части до те пор, пока двигатель не начнет стабильно вращаться и после этого нажимаем "Stop". Если вы уверены, что все двигатели и регуляторы одинаковые, то можно поставить галочку "Calibrate all motor outputs at the same time".
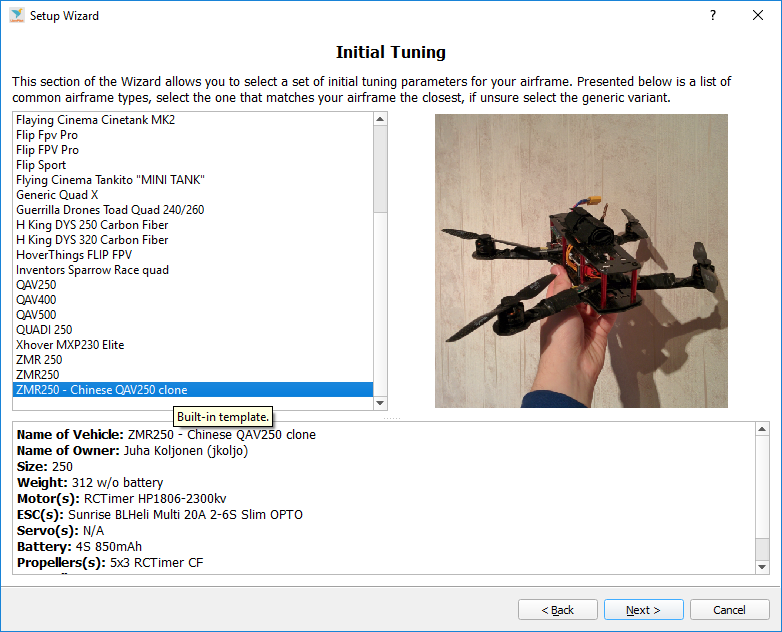
Теперь стоит уточнить тип нашего набора комплектующих. Да, у нас китайский клон QAV250.
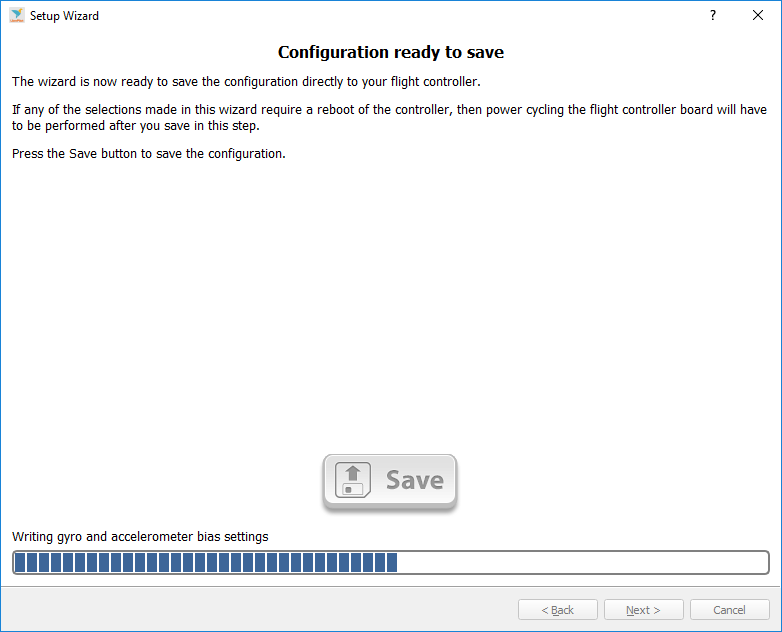
Нажмите "Next" и произойдет сохранение настроек.
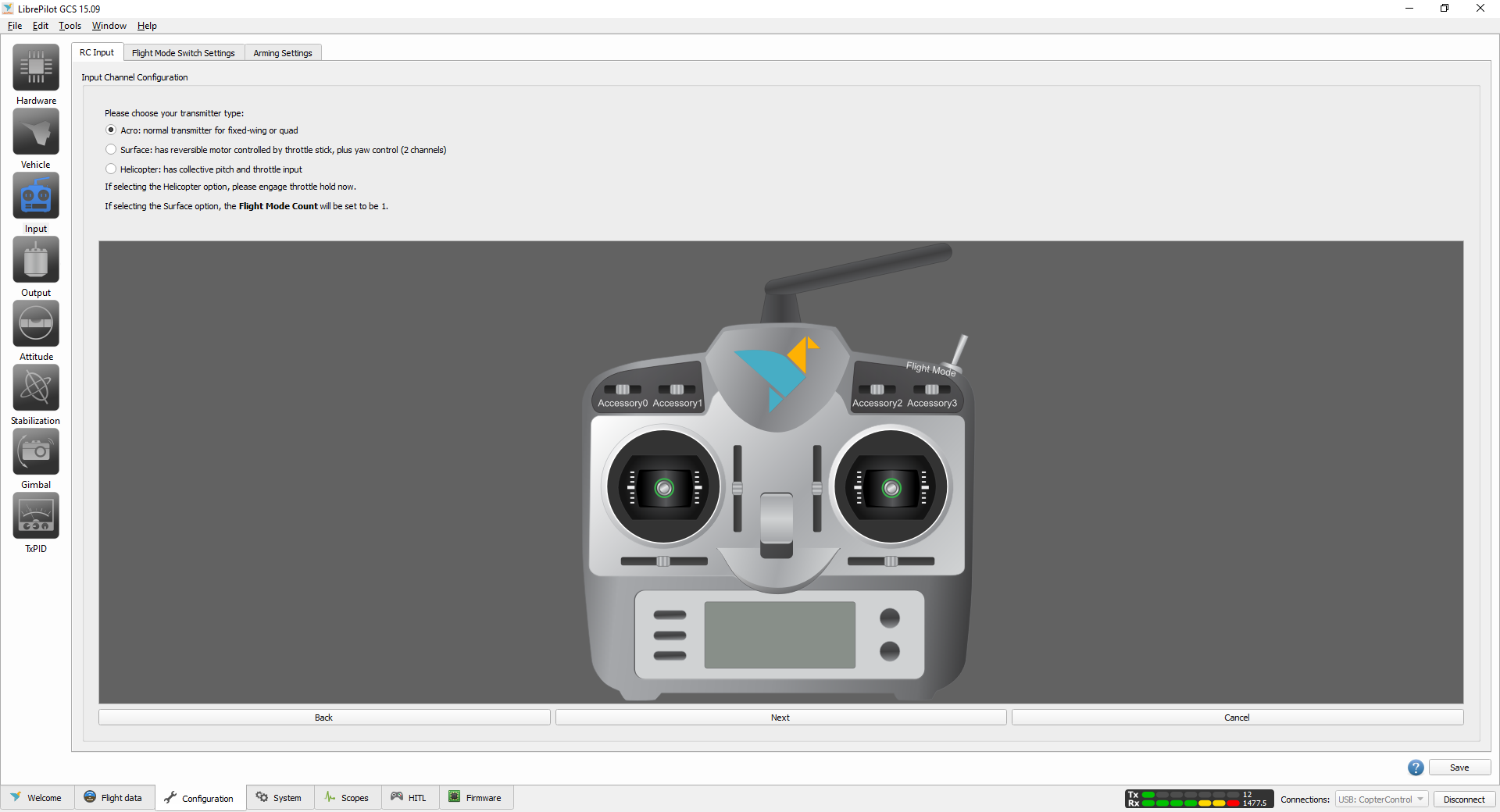
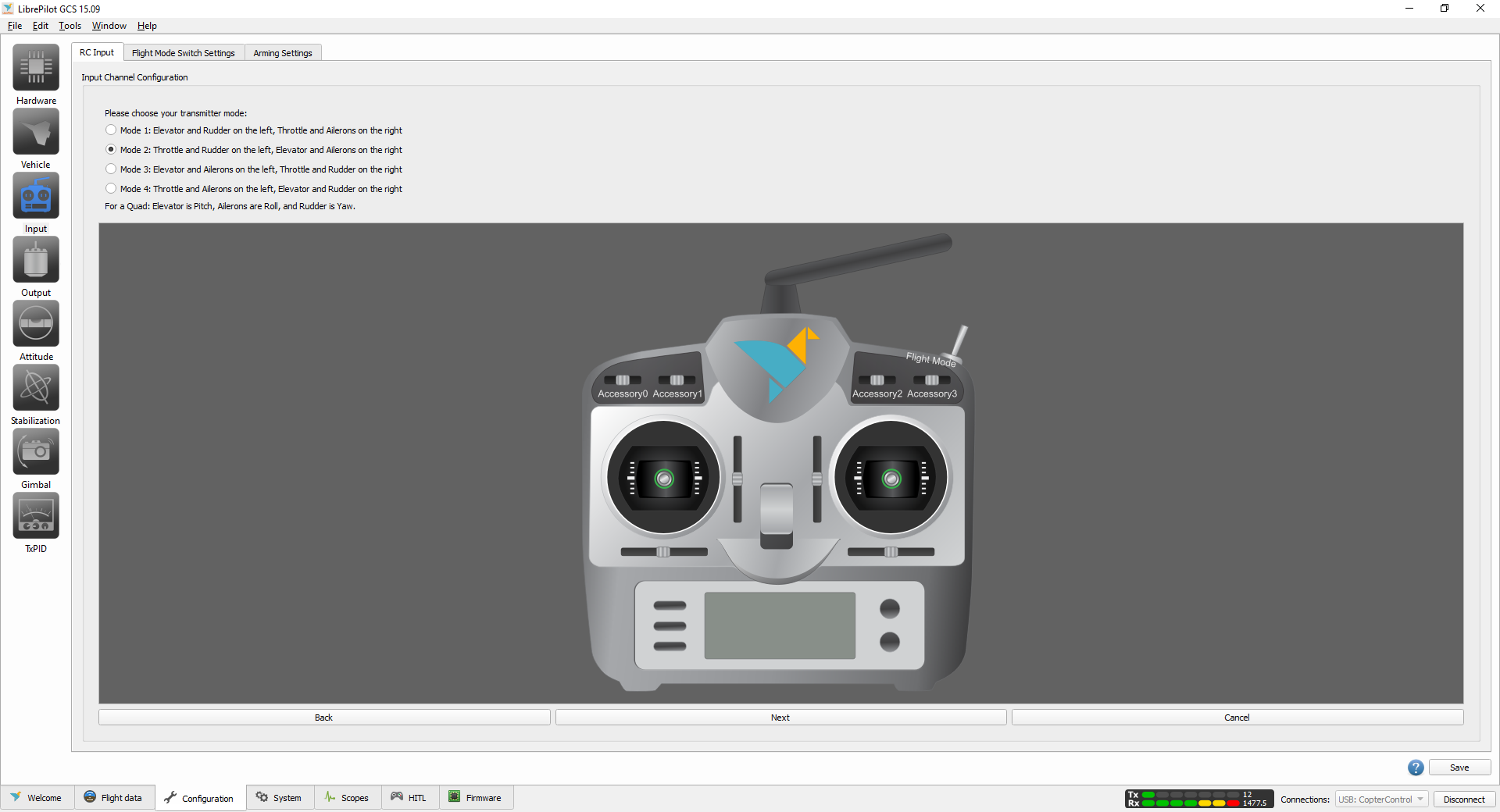
Осталось настроить приемник. Для начала выбираем тип "Acro":
Далее выбираем "Mode 2". У нас аппаратура на которой газ и руль слева:
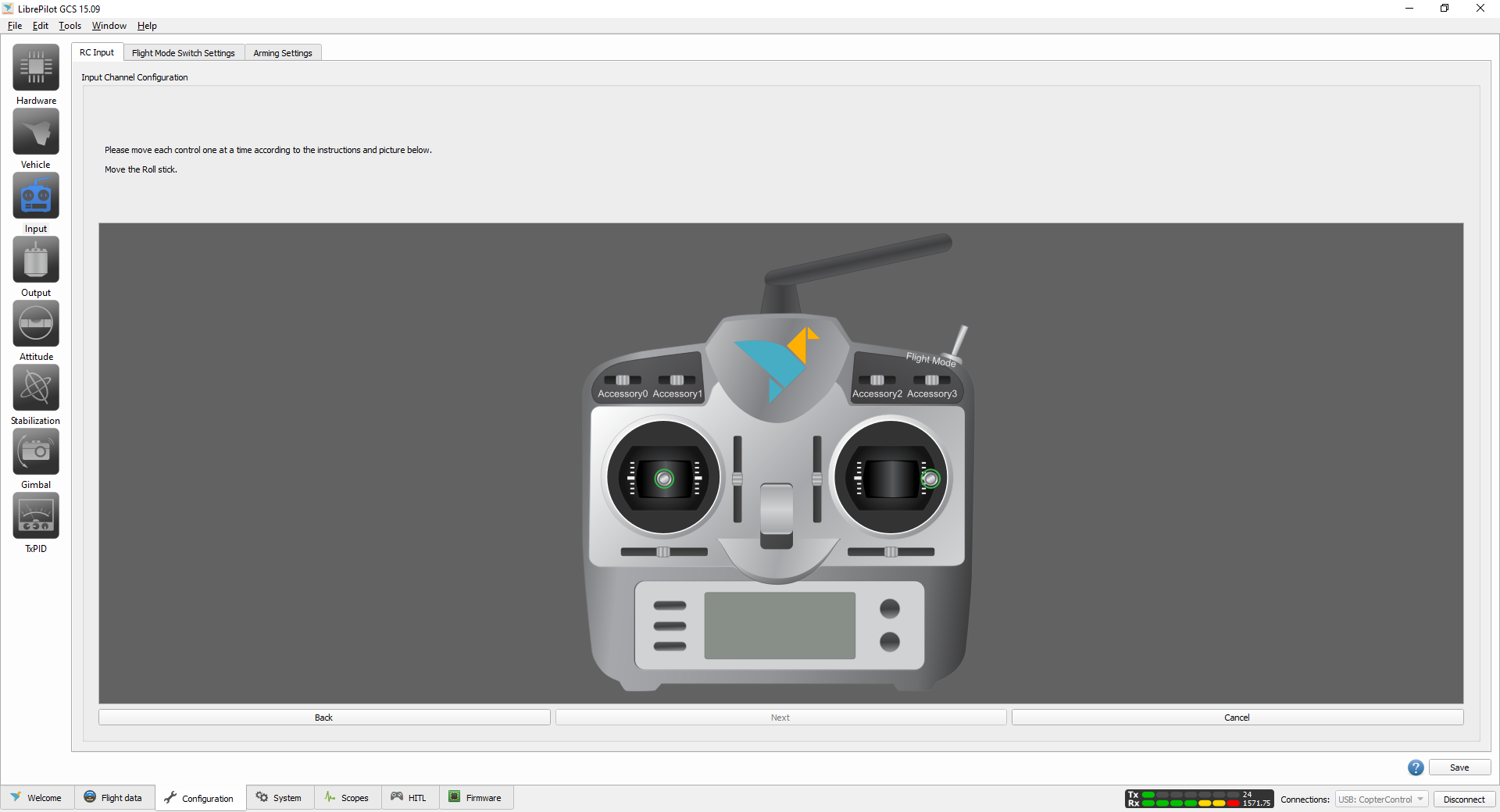
На следующем этапе органы управления на пульте в программе будут по очереди двигаться и вам нужно будет делать то же самое. Сначала будет двигаться стик газа и вам также надо будет покачать его вверх-вниз. Далее правый стик влево-вправо и т.д.
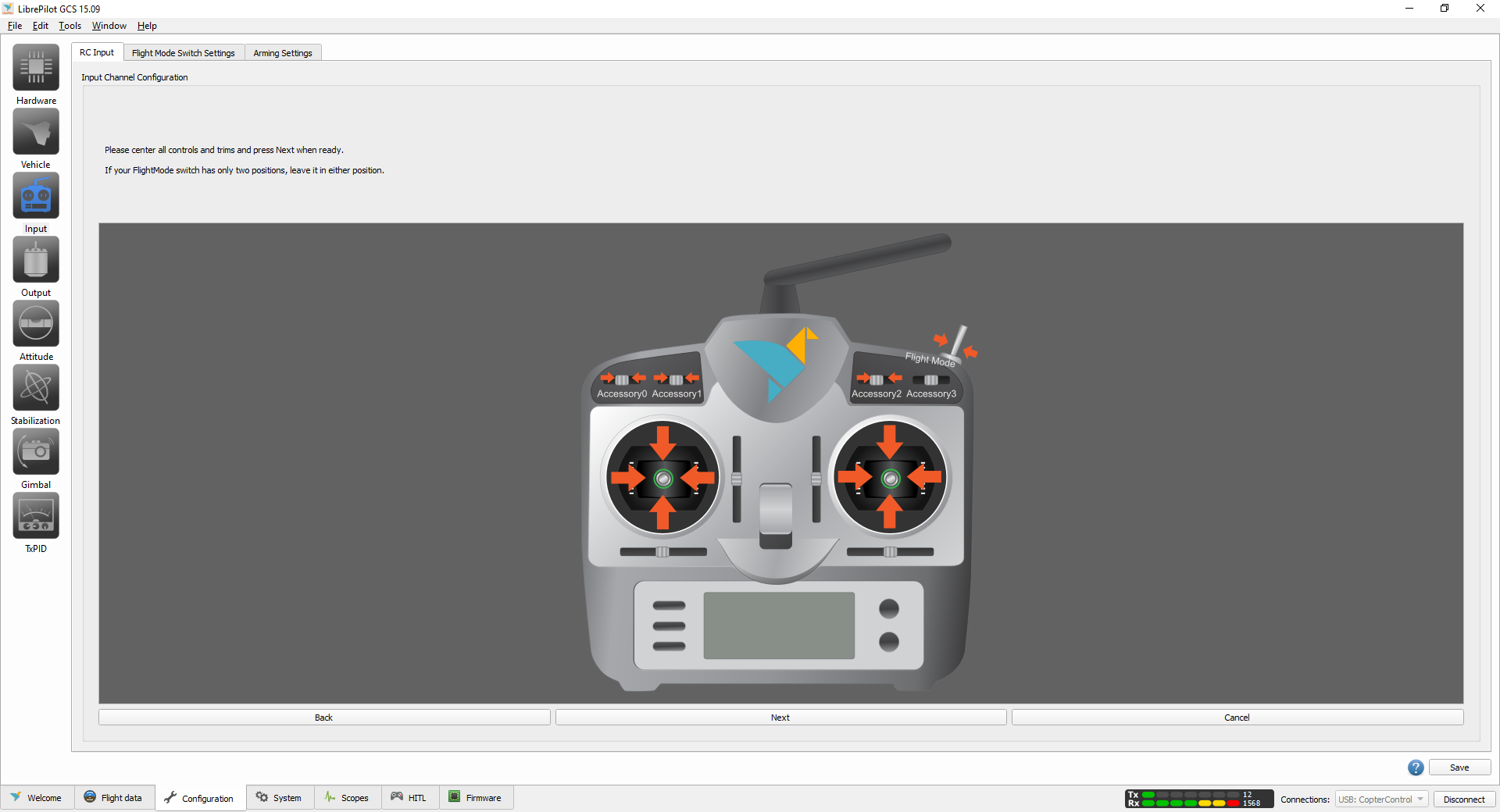
Установите все стики и триммеры в центральное положение:
Теперь необходимо подвигать хаотично стиками, меняя все положения от минимумов до максимумов:

В следующем окне вам предлагают убедиться, то ни один из стиков не инвертирован, а если это не так, то исправить это:

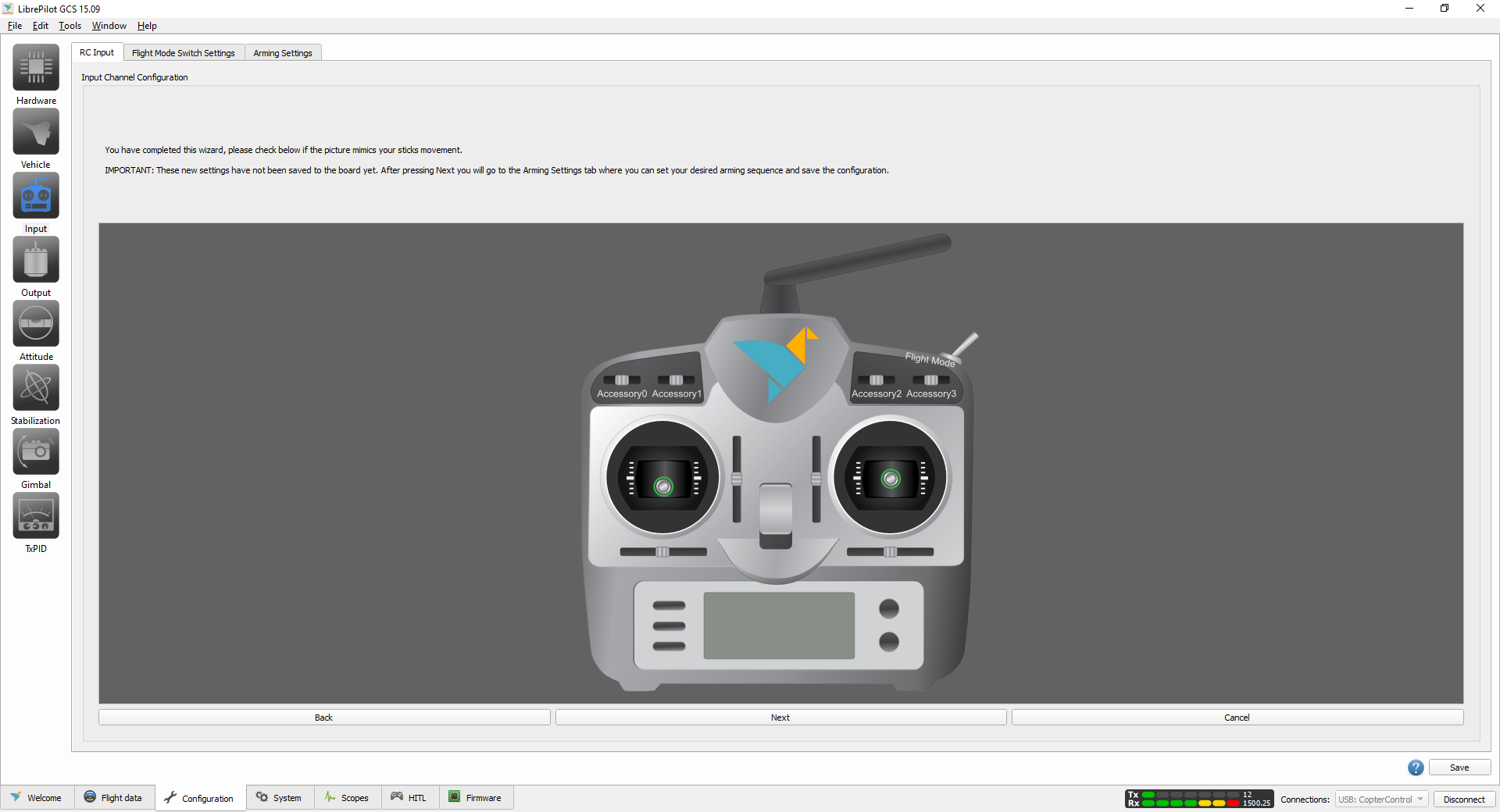
Проверьте окончательно, что все работает правильно:
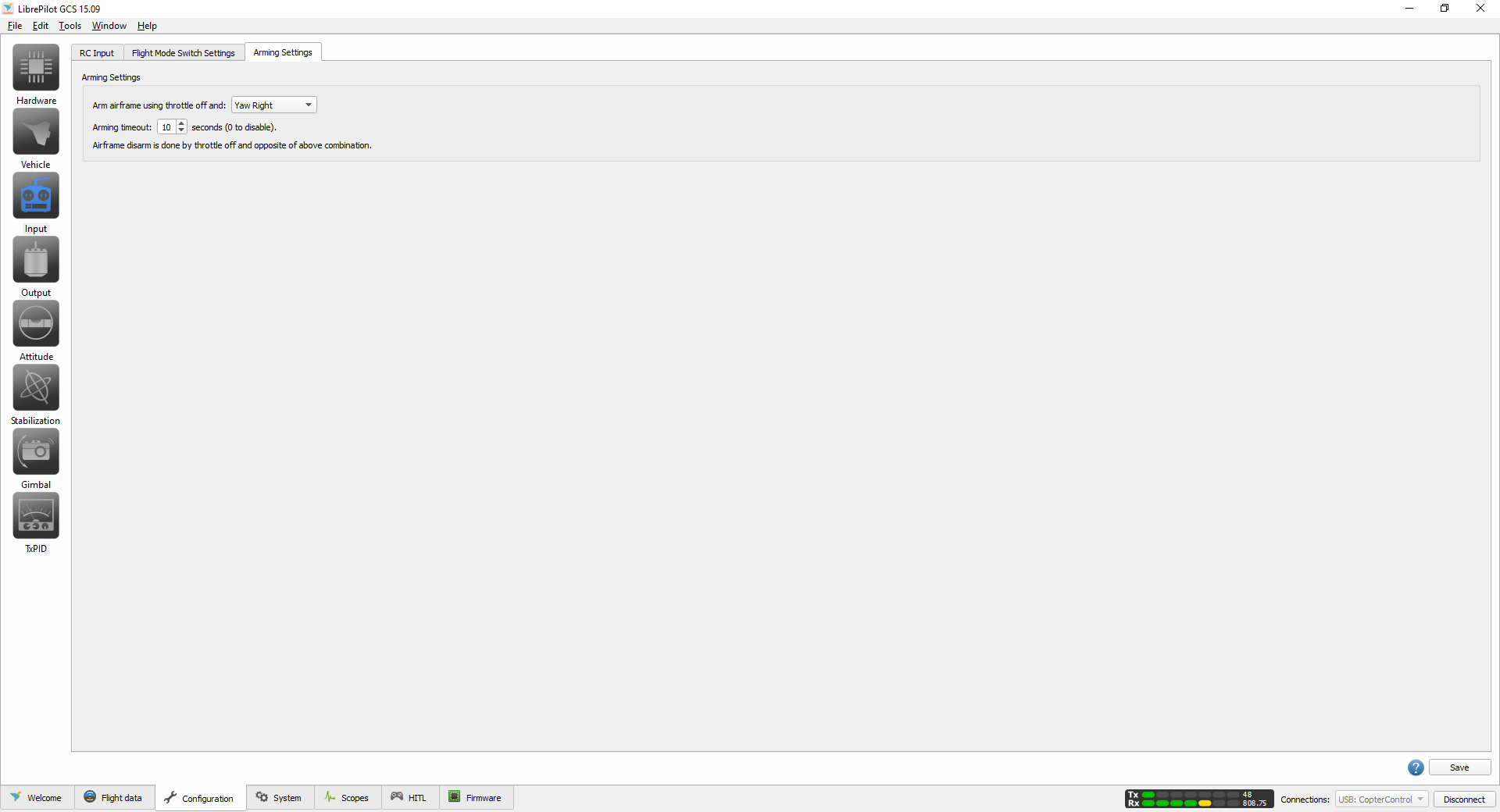
Теперь укажите способ "запуска" двигателей. У нас указан вариант, при котором надо будет отклонить левый стик влево-вниз до упора. Таймаут отключения — 10с.
Летать можно уже сейчас. В перспективе будет полезным разобраться полностью во всех настройках, но чтобы летать хватит и этого.
Видео полета
Мы будем очень рады, если вы поддержите наш ресурс и посетите магазин наших товаров shop.customelectronics.ru.
Метки: aliexpress, copter, ZMR250, гоночный, квдрокоптер, коптер Просмотров: 15936