Миниатюрный манипулятор
Необходимые материалы и подробная инструкция по сборке очень простого и функционального манипулятора на базе дешевых китайских сервоприводов.

Миниатюрный манипулятор Общий вид
Описание конструкции
Автором этой разработки является deGHIZmo, пользователь сайта Thingiverse. Вот сама страница проекта. Также он подготовил достаточно подробную инструкцию по сборке.
Со своей стороны мы отметили высокую заинтересованность аудитории нашего сайта к нашему проекту большого манипулятора из оргстекла (часть 1, часть 2, часть 3) и решили адаптировать материалы по миниатюрного манипулятора для пользователей нашего ресурса.
В частности, в этой статье вы сможете найти список необходимых материалов для сборки, файлы для скачивания и подробную инструкцию.

Миниатюрный манипулятор Общий вид
Список комплектующих
Для сборки потребуется:
- Детали, напечатанные на 3D-принтере (файлы можно скачать по ссылкам в конце статьи)
- Сервоприводы. Достаточно четырех штук, но лучше сразу иметь запасной
- Винт М4х30 с широкой шляпкой, 1шт
- Винт М4х20 с широкой шляпкой, 7шт
- Винт М3х20 с шестигранной головой, 1шт
- Винт М3х14 с шестигранной головой, 7шт
- Штифт диаметром 4мм и длинной 20мм, 1шт
- Гайка М4 шестигранная с нейлоновым стопорным кольцом, 8шт
- Гайка М3 шестигранная с нейлоновым стопорным кольцом, 8шт
- Гайка М3 шестигранная, 4шт
- Шайба М4, 8шт

Комплект деталей
Порядок сборки
Желательно иметь под рукой какое-либо устройство, позволяющее электрически управлять устройством. Это может быть Arduino, хоббийный пульт управления или что-то еще на ваше усмотрение. Мы, конечно, рекомендуем наш специализированный тестер.
Все отверстия напечатанных деталей предварительно необходимо дополнительно рассверлить сверлом соответствующего диаметра.
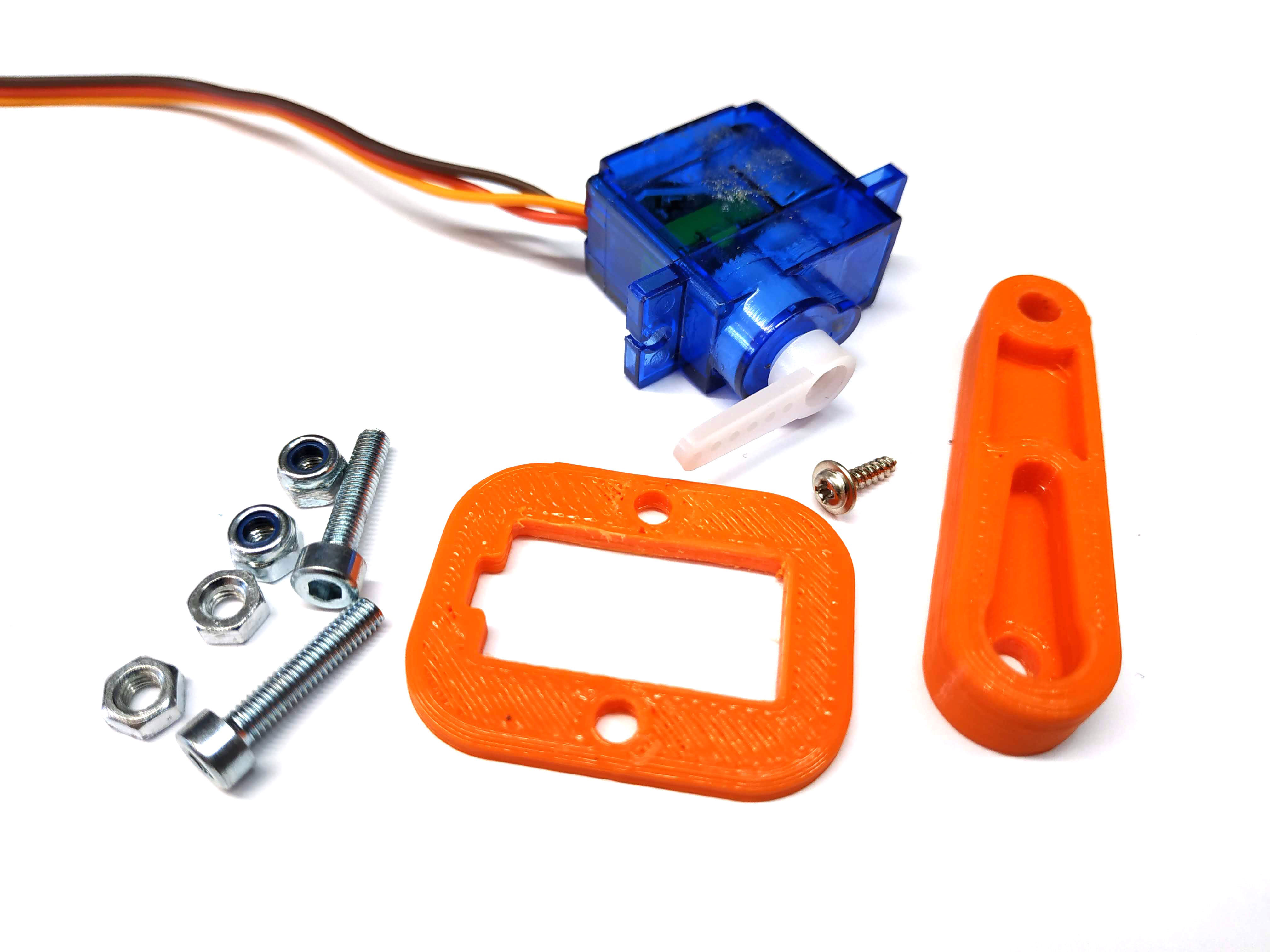
В первую очередь необходимо собрать механический захват из деталей, показанных на рисунке.

Предварительно установите двигатель приблизительно в среднее положение. Рычаг из комплекта сервопривода придется укоротить. Затем соберите детали вместе также, как показано на рисунке в том же положении что и на рисунке.
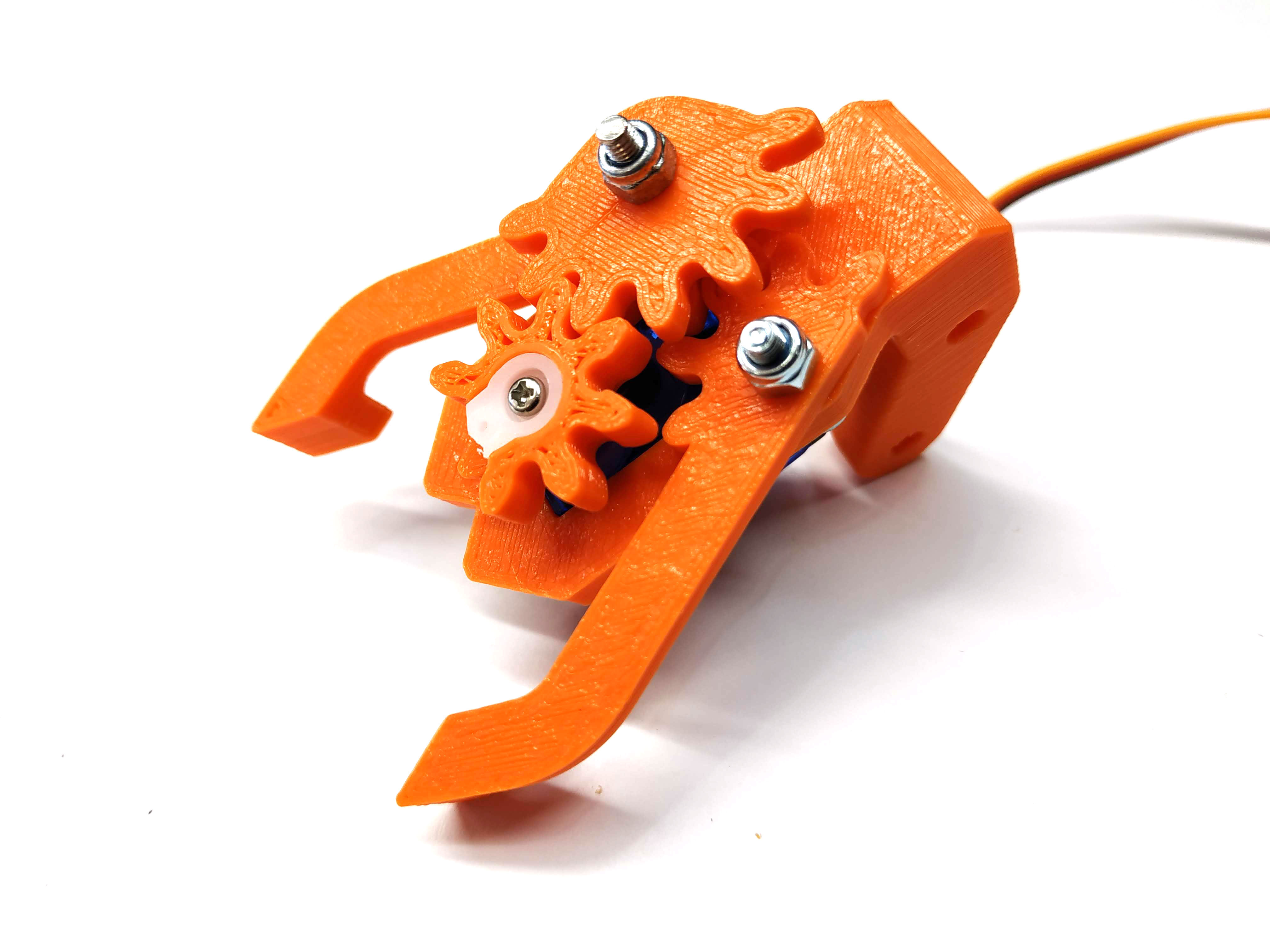
Не следует при этом туго затягивать гайки. Клешни должны свободно двигаться друг относительно друга.

Далее, из деталей, показанных на рисунке, собираем основание.

Качалка сервопривода прикручивается крепежом из комплекта. Корпус самого сервопривода можно не прикручивать.

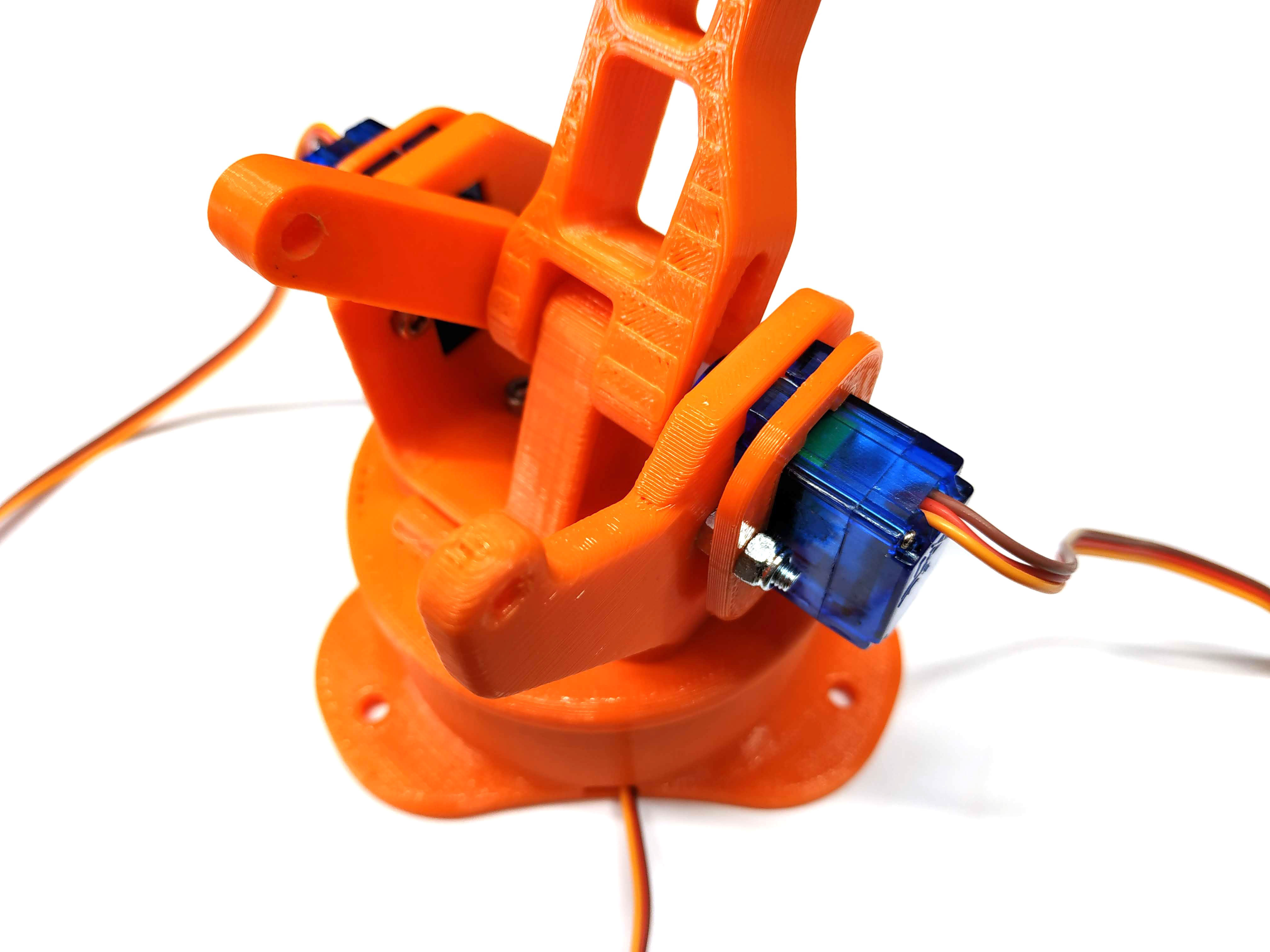
Далее устанавливаем левый сервопривод.
Винты устанавливаются с внутренней стороны П-образного основания и прикручиваются гайками. Затем устанавливается сервопривод и прижимаются планкой.

При центральном расположении вала сервопривода, рычаг должен находиться приблизительно в том же положении, что и на картинке.
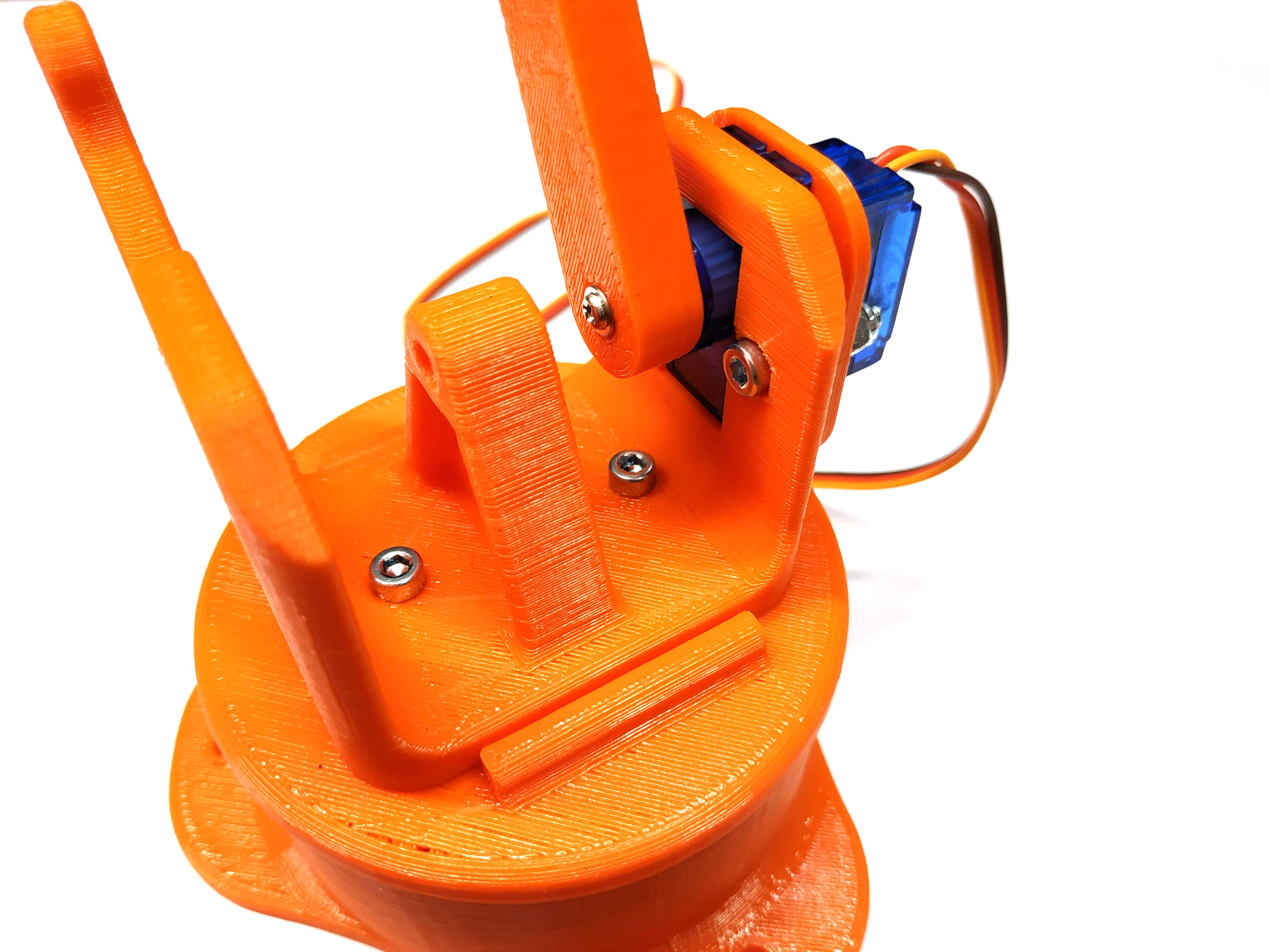
Далее устанавливаем основное плечо.
Сначала необходимо установить сам рычаг и вставить штифт в основание в качестве оси. Далее установить в паз качалку сервопривода и сам двигатель при помощи планки.

Обратите внимание, что при этом, если вал сервопривода установлен в среднем положении, плечо должно оказаться приблизительно в том же положении, что и на картинке.
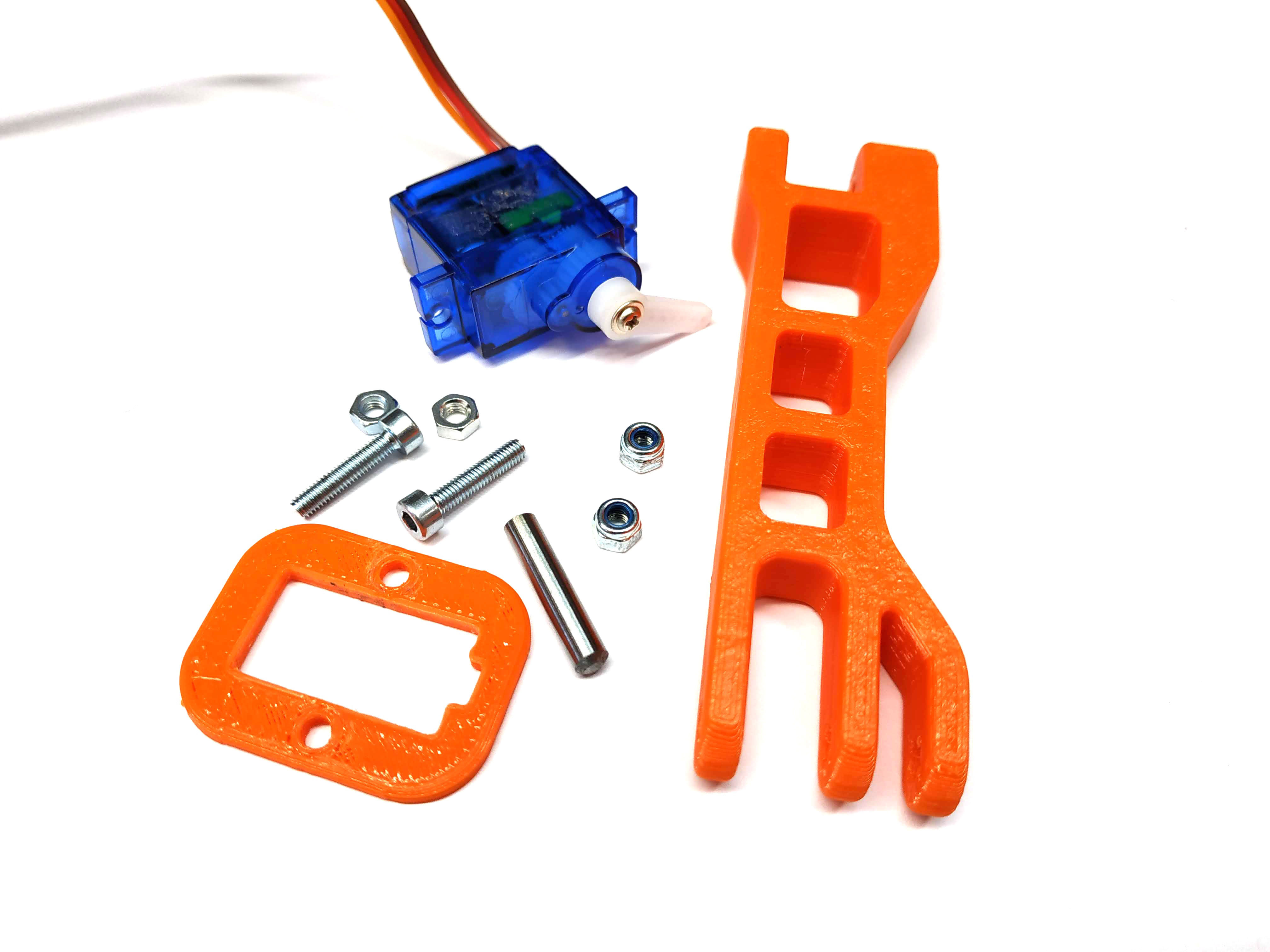
Затем, используя детали показанные на рисунке, требуется собрать систему тяг.

Винт М4х30 устанавливается в верхней части плеча.

Не следует затягивать гайки сильно. После сборки манипулятор должен сохранять возможность свободно двигаться.

Затем остается только установить захват и тягу, удерживающую его параллельно земле.

Сначала проще установить сам захват.

Далее требуется закрепить тягу в верхней части.

Если все собрано верно, то полностью собранное устройство будет выглядеть следующим образом:
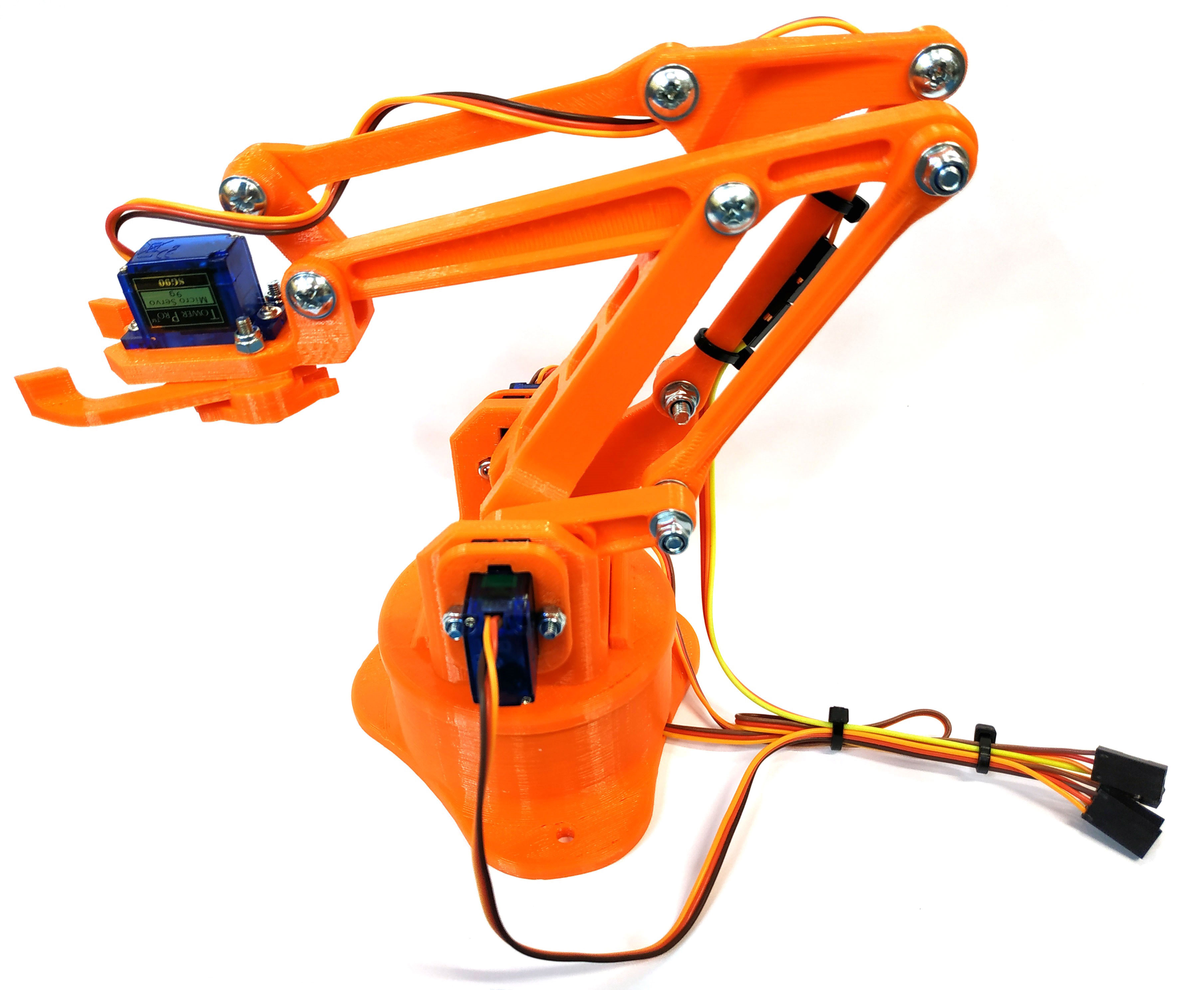
Миниатюрный манипулятор. Вид слева

Миниатюрный манипулятор. Вид справа
Обратите внимание, что на фото все валы двигателей находятся приблизительно в среднем положении.
Файлы для скачивания
Деталь 1
Деталь 2
Деталь 3
Деталь 4
Деталь 5
Деталь 6
Деталь 7
Деталь 8
Деталь 9
Деталь 10
Деталь 11
Деталь 12
Деталь 13
Деталь 14
Мы будем очень рады, если вы поддержите наш ресурс и посетите магазин наших товаров shop.customelectronics.ru.
Вы можете сделать этот манипулятор самостоятельно, а можете приобрести его как набор.
Метки: meArm, манипулятор, робо-рука, сервопривод Просмотров: 6482