Робот-жук на дискретных логических элементах
Относительно простое устройство, которое представляет собой мобильную платформу с датчиками препятствий в виде концевых выключателей. Устройство объезжает препятствия, включается/выключается по хлопку, имеет регулировки скорости и времени объезда. Все, включая драйвер, выполнено на дискретных логических элементах.
Устройство разработано для изучения различных схемотехнических решений, а также может быть использовано для тренировки навыков пайки, так как включает в себя много разных типов корпусов радиоэлементов.
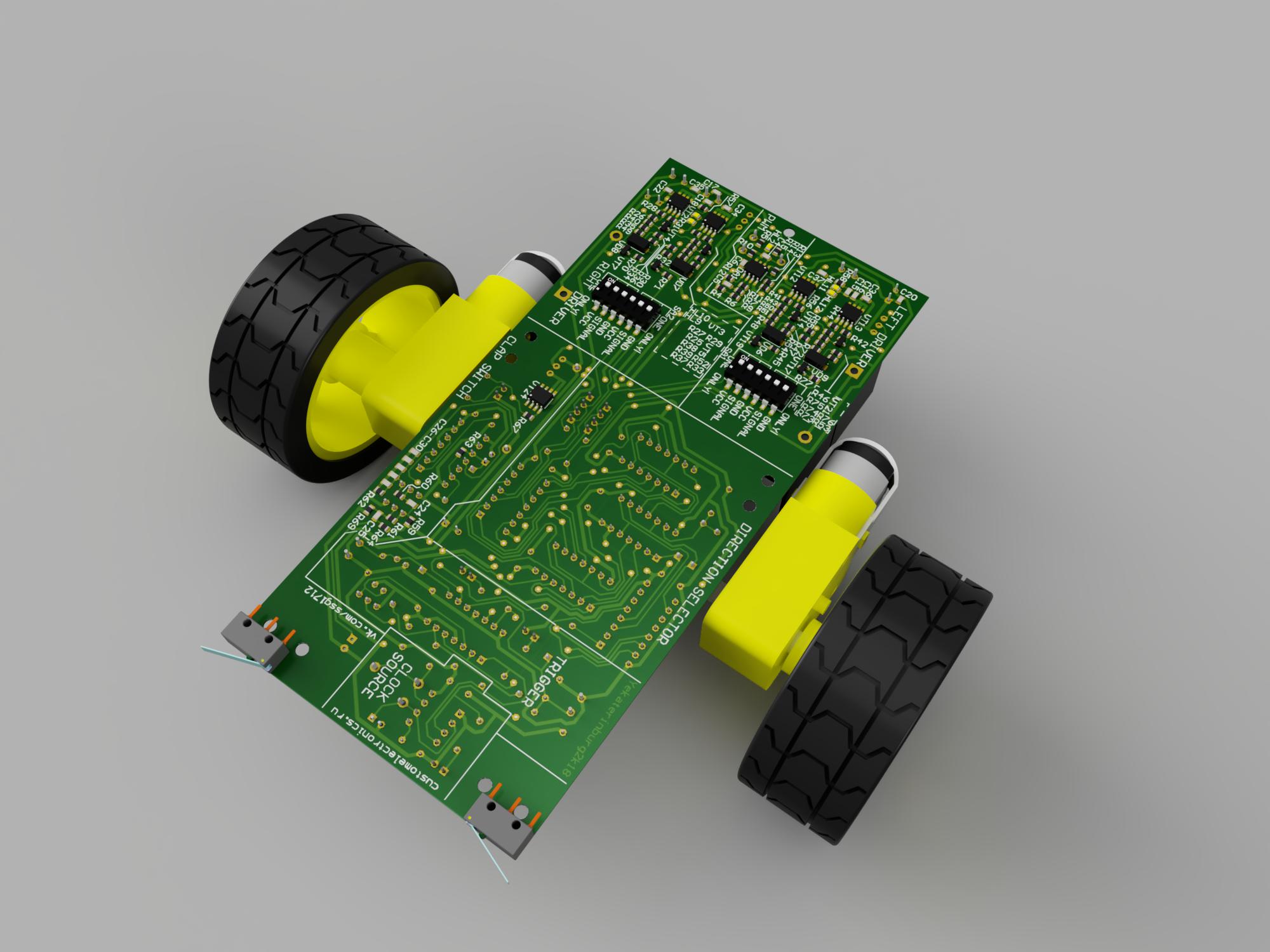
Робот-жук. Общий вид
Структурная схема
В начальном состоянии жук всегда едет вперед. Это задается сочетаем сигналов двигателей. Если срабатывает один из датчиков, то блок триггеров (TRIGGER) разрешает работу тактового генератора (CLOCK SOURCE) и счетчика, который входит в блок DIRECTION SELECTOR. Во время счета жук выполняет последовательность действий для объезда препятствия. Сначала он останавливается, затем делает паузу, отъезжает назад, делает паузу, поворачивает налево или направо, снова делает паузу и возобновляет движение. На пятый такт работы происходит сброс триггера.
В зависимости от сработавшего датчика жук поворачивает налево или направо. Блок выбора направления движения формирует четыре сигнала управления двигателями – по два на каждый драйвер. Сочетания логических уровней этих сигналов позволяет вращать двигатель вперед или назад, либо остановить двигатель. Поворачивает жук за счет того, что колеса вращаются в противоположные стороны.
Питание всей схемы осуществляется от двух LiIon-аккумуляторов типоразмера 18650, включенных последовательно, либо внешнего источника питания с напряжением 7-9В. Питание на драйверы двигателей подается через “хлопковый выключатель” (CLAP SWITCH). Это позволяет остановить или возобновить движение хлопком в ладоши.
Для регулировки скорости движения жука используется регулируемый генератор ШИМ-сигнала (PWM).
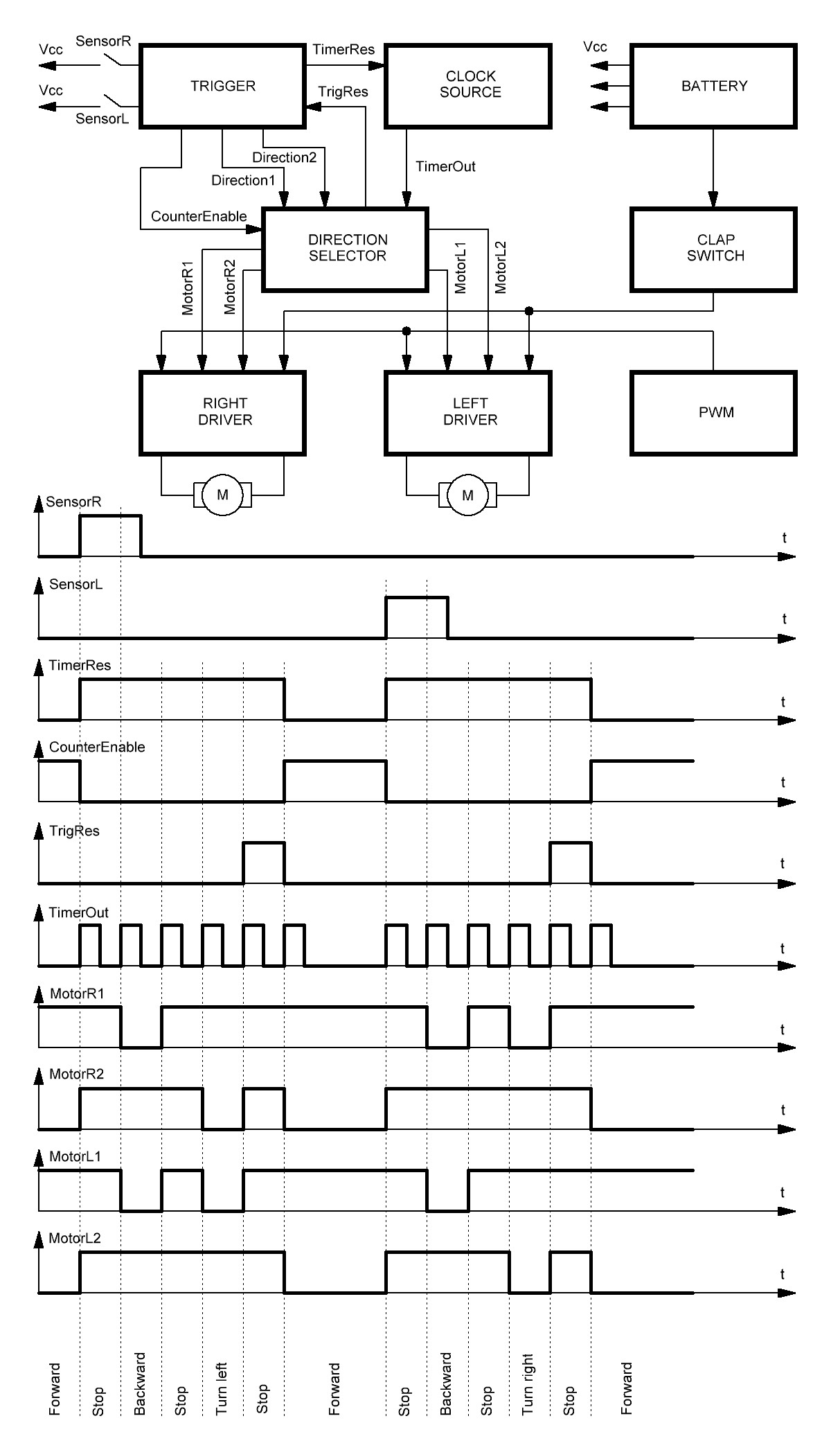
Структурная схема и сигналы
Принципиальная схема
Картинка кликабельна, а в конце статьи можно найти ссылку для скачивания в формате pdf.
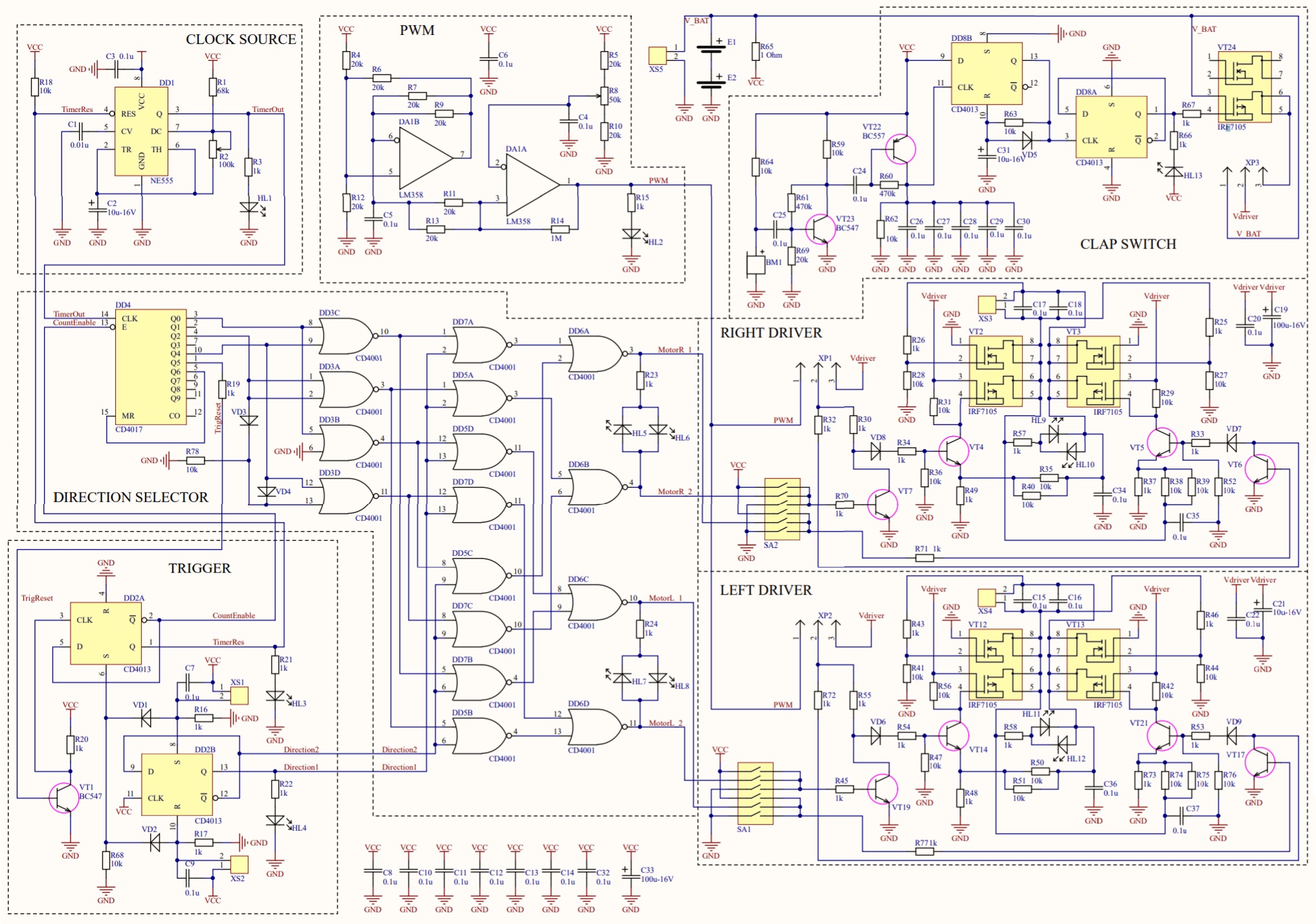
Принципиальная схема
Обратите внимание, что все блоки устройства скомпонованы по блокам. Это позволяет им работать автономно и наглядно видеть функциональность кусков схемы. Дополнительные комментарии по работе схемы вы найдете в инструкции по сборке устройства.
Сборочный чертеж
Все компоненты размещены на двухсторонней плате размером 170х80мм. Ее вполне можно изготовить в домашних условиях и весь верхний слой проводников выполнить перемычками. Все выводные компоненты размещены на лицевой стороне печатной платы.
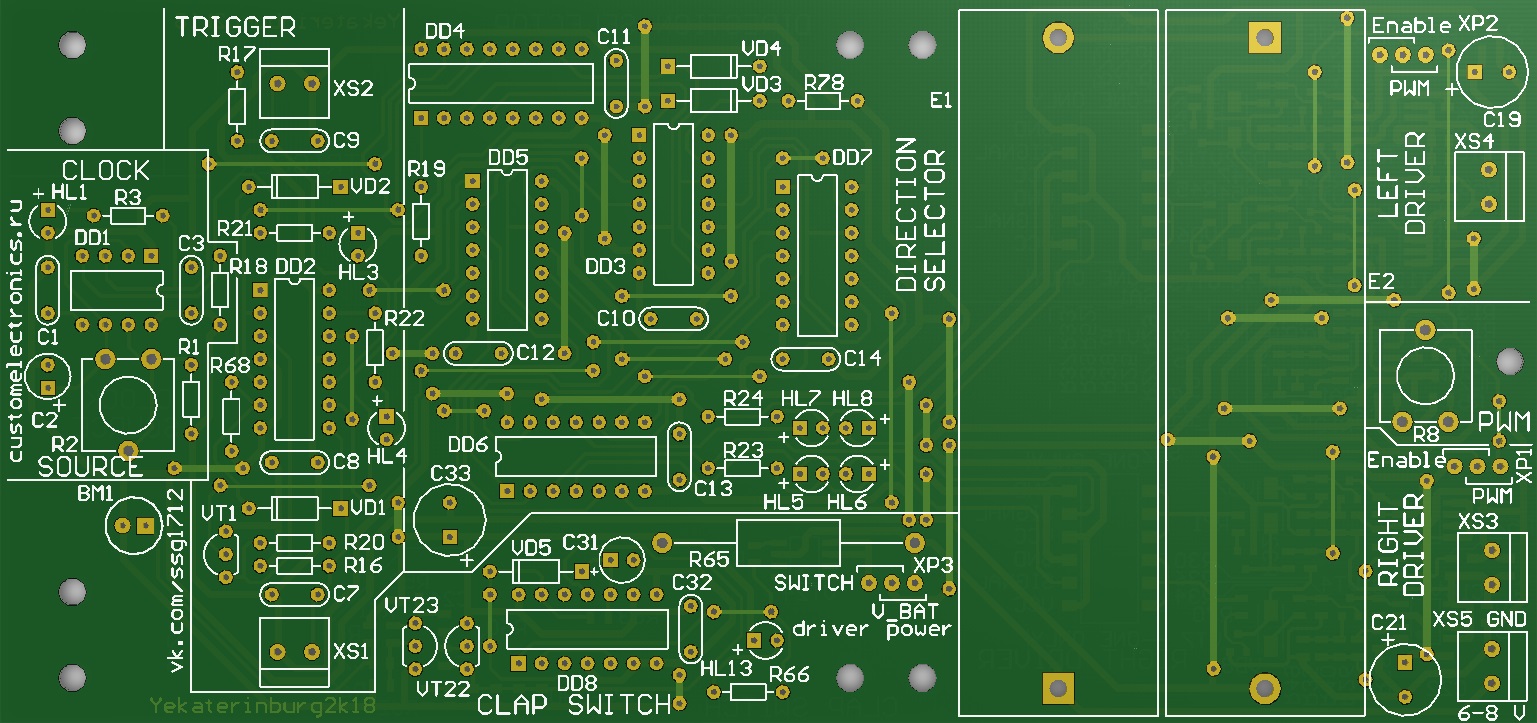
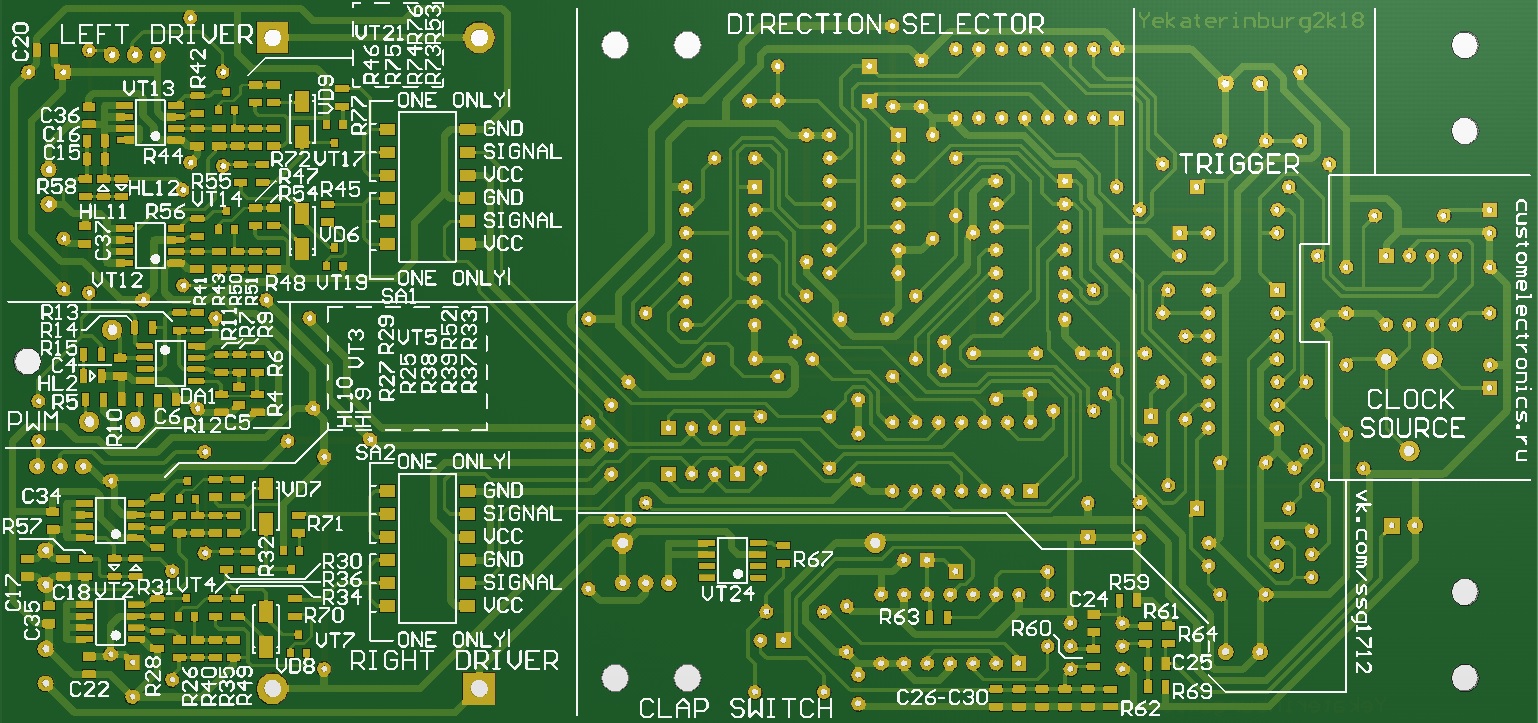
Печатная плата с лицевой стороны
На обратной стороне расположены SMD-компоненты драйвера, ШИМ-генератора и хлопкового выключателя.
Печатная плата с обратной стороны
К собранной плате винтами крепится скоба-держатель двигателей. Микропереключатели устанавливаются в передней части жука на пластиковых стяжках.
Перечень элементов
Можно скачать отдельным документом по ссылке в конце статьи.
- Резистор, R1, MF-0.125-68k, 1шт
- Резистор подстроечный, R2, CA9MV 100k, 1шт
- Резистор подстроечный, R8, CA9MV 50k, 1шт
- Резистор, R3,R16,R17,R19-R24,R66, MF-0.125-1k, 10шт
- Резистор, R18,R68,R78, MF-0.125-10k, 3шт
- Резистор, R27-R29,R31,R35,R36,R38-R42,R44,R47,R50-R52,R56,R59,R62-R64,R74-R76, 0805, 10k, 24шт
- Резистор, R4-R7,R9-R13,R69, 0805, 20k, 10шт
- Резистор, R14, 0805,1M, 1шт
- Резистор, R60,R61, 0805, 470k, 2шт
- Резистор, R15,R25,R26,R30,R32-R34,R37,R43,R45,R46,R48,R49,R53-R55,R57,R58,R67,R70-R73,R77, 0805, 1k, 24шт
- Резистор, 1Вт, 1Ом, R65, MF-1-1, 1шт
- Конденсатор, C1, X7R, 0.01uF, 10%, 50V, 1шт
- Конденсатор, C4-C6,C15-C18,C20,C22,C24-C30, C34-C37, 0805, 0.1uF, 20шт
- Конденсатор электролитический, C2,C31, 10uF-16V, 2шт
- Конденсатор выводной, C3,C7-C14,C32, X7R, 0.1uF, 10%, 50V, 10шт
- Конденсатор электролитический, C19,C21,C33, 470uF-16V, 3шт
- SO-8, DA1, LM358DT, 1шт
- DIP-8, DD1, NE555P, 1шт
- DIP-14, DD2,DD8, CD4013BE, 2шт
- DIP-14, DD3,DD5,DD6,DD7, CD4001BE, 4шт
- DIP-16, DD4, CD4017BE, 1шт
- Диод, VD1-VD5, 1N4001, 5шт
- Диод, SMA, VD6-VD9, S1M, 4шт
- Транзистор, TO-92, VT1,VT23, BC547BTA, 2шт
- Сборка транзисторов, SOIC-8, VT2,VT3,VT12,VT13,VT24, IFR7105, 5шт
- Транзистор, SOT-23, VT4-VT7,VT17,VT17,VT19,VT21, BC817-40, 8шт
- Транзистор, TO-92, VT22, BC557BTA, 1шт
- Светодиод, 3мм, HL1,HL3-HL8,HL13, FYL-3014ED1A, 8шт
- Светодиод, 0805, HL2,HL9-HL12, KP-2012SGC, 5шт
- Микрофон электретный, BM1, EM-6050(p), 1шт
- Вилка на плату, XP1,XP2,XP3, PLS-40, 0,3шт
- Клемма, XS1-XS5, DG340-3.81-02P, 5шт
- Переключатель, SOIC-8, SA1,SA2, DMR-06-V, 2шт
- Держатель батареи, E1,E2, LiIon, 18650, 2шт
- Микропереключатель, , KMSW-14, 2шт
- Джампер, 2.54, 3шт
- Панелька DIP-8, SCS-8, 1шт
- Панелька DIP-14, SCS-14, 6шт
- Панелька DIP-16, SCS-16, 1шт
- Ручка к CA9V, CA9MA5, 2шт
- Колесо, 2шт
- Двигатель с редкутором, 2шт
- Печатная плата, 1шт (файлы для изготовления в конце статьи)
- М3х30 винт цинк, 4шт
- М3х10 винт цинк, 4шт
- Гайка М3, 8шт
- М3х10 стойка мама-папа, 1шт
- Гайка М3 пластик, 1шт
- Термоусадочная трубка
- Монтажный провод
- Кабельные стяжки
- Скоба, напечатанная на 3D-принтере (ссылка для скачивания модели в конце статьи)
Вот так выглядит полный набор компонентов на это устройство:
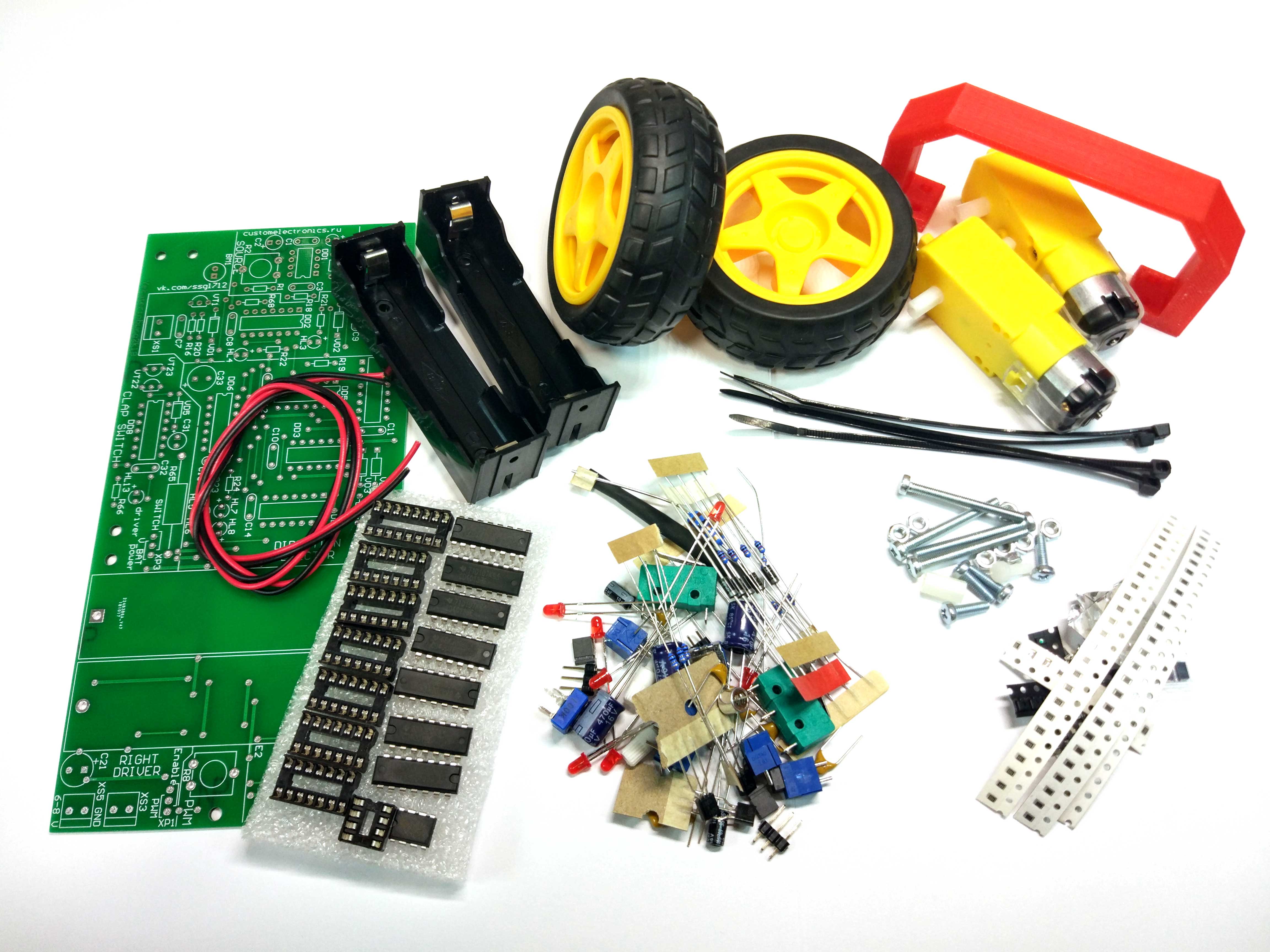
Робот-жук. Набор компонентов
Инструкция по сборке
С одной стороны можно собрать все устройство целиком и рассчитывать, что оно будет нормально функционировать. Мы рекомендуем запускать блоки изделия по частям, но даже если вы не собираетесь собирать устройство в предложенной последовательности, все равно изучите этот раздел:
- Установите клемму XS5 и резистор R65. Для проверки всех блоков на клемму XS5 подается питающее напряжение 7В с соблюдением полярности, указанной на плате
- Собрать и проверить блок “Clock Source”. При включении питания светодиод HL1 должен мигать с частотой, зависящей от установки R2
- Собрать и проверить блок “Clap Switch” (микрофон BM1 также входит в его состав). Под воздействием громкого звука (хлопок, щелчок пальцами) светодиод HL13 должен изменять свое состояние
- Собрать блок “PWM” и проверить блок “PWM”. При его правильной работе, яркость свечения светодиода HL2 должна задаваться сопротивлением резистора R8
- Собрать и проверить блок “Trigger”. Микропереключатели-датчики следует подключить, но не закреплять на плате. Подключение производится монтажным проводом к клеммам XS1, XS2. При замыкании микропереключателей светодиод HL4 должен включаться и выключаться
- Собрать и проверить блоки “Left Driver” и “Right Driver”. Для проверки потребуется установить перемычки на разъемы XP1-XP3. XP1 и XP2 позволяют подать на разрешающий вход драйвера ШМ-сигнал или логическую единицу. XP3 находится в блоке “Clap Switch” и подает питание на драйвер через выключатель или напрямую. Имитировать входные сигналы можно при помощи переключателей SA1 и SA2. Оба переключателя разделены на две условные группы. В каждой группе три сигнала: VCC, SIG и GND. Возможные варианты положения переключателей показаны на рисунке. а) – не корректно (на вход драйвера не подано ничего), б) – не корректно (подано одновременно два сигнала), в) – не корректно (два нуля – запрещенное состояние), г) – корректно (двигатель вращается), д) – корректно (на вход поданы логические сигналы схемы)
- Собрать и проверить блок “Direction Selector”. Этот блок можно проверить только если блоки “Clock Source” и “Trigger” уже собраны. Светодиоды HL5-HL8 условно показывают направление движения. При включении питания они должны показывать, что жук едет вперед, а при обнаружении препятствия – демонстрировать работу алгоритма
- Установите оставшиеся детали на печатную плату. На этом этапе можно промыть изделие
- Подключите и закрепите микропереключатели на плате при помощи кабельных хомутов
- Установите и подключите двигатели. Подключение производится к клеммам XS3, XS4. Полярность и порядок подключения определите экспериментально таким образом, чтобы движение жука соответствовало описанию
- Установите заднюю опору в виде латунной стойки

Положение переключателей
Робот-жук с обратной стороны
Настройка
Для нормальной работы все клавишные переключатели должны находиться в положении SIGNAL.
На разъем XP3 надо установить в положение SWITCH, чтобы работало управление питанием драйвера через хлопковый выключатель. Если он не функционирует, то можно установить переключатель в положение V_BAT. Тогда драйвер будет всегда активен.
Джамперы XP1, XP2 отвечают за управление скоростью движения двигателей. В положении PWM будет возможность регулировать ШИМ резистором R8. Если установить джампер в положение Enable, двигатели будут всегда работать на максимальной скорости.
Резистором R2 можно регулировать длительности остановок и движения при объезде препятствий.
Видео
Файлы для скачивания
Gerber-файлы для изготовления печатной платы
Перечень элементов
Принципиальная схема
Скоба для крепления двигателей
Обращаем ваше внимание, что вы можете купить это устройство в виде набора в нашем магазине
Метки: робот-жук, схемотехника Просмотров: 6225