Робот-жук мини
Упрощенная версия предыдущей разработки с использованием исключительно компонентов, предназначенный под монтаж в отверстия.
Описание устройства
Основная цель разработки устройства — демонстрация возможностей схемотехники на простых дискретных компонентах.
Робот-жук представляет из себя печатную плату с закрепленной на ней мотор-рамой и двумя аккумуляторами формата 18650. В торцевой части установлены два концевых выключателя, которые позволяют детектировать столкновение с препятствием. Сразу после включения питания жук начинает двигаться вперед до столкновения с препятствием. При столкновении происходит остановка. Затем, после паузы, робот объезжает назад, поворачивается на небольшой угол, делает паузу и снова возобновляет движение.
Все собрано на простых выводных компонентах с применением 3D-печати.
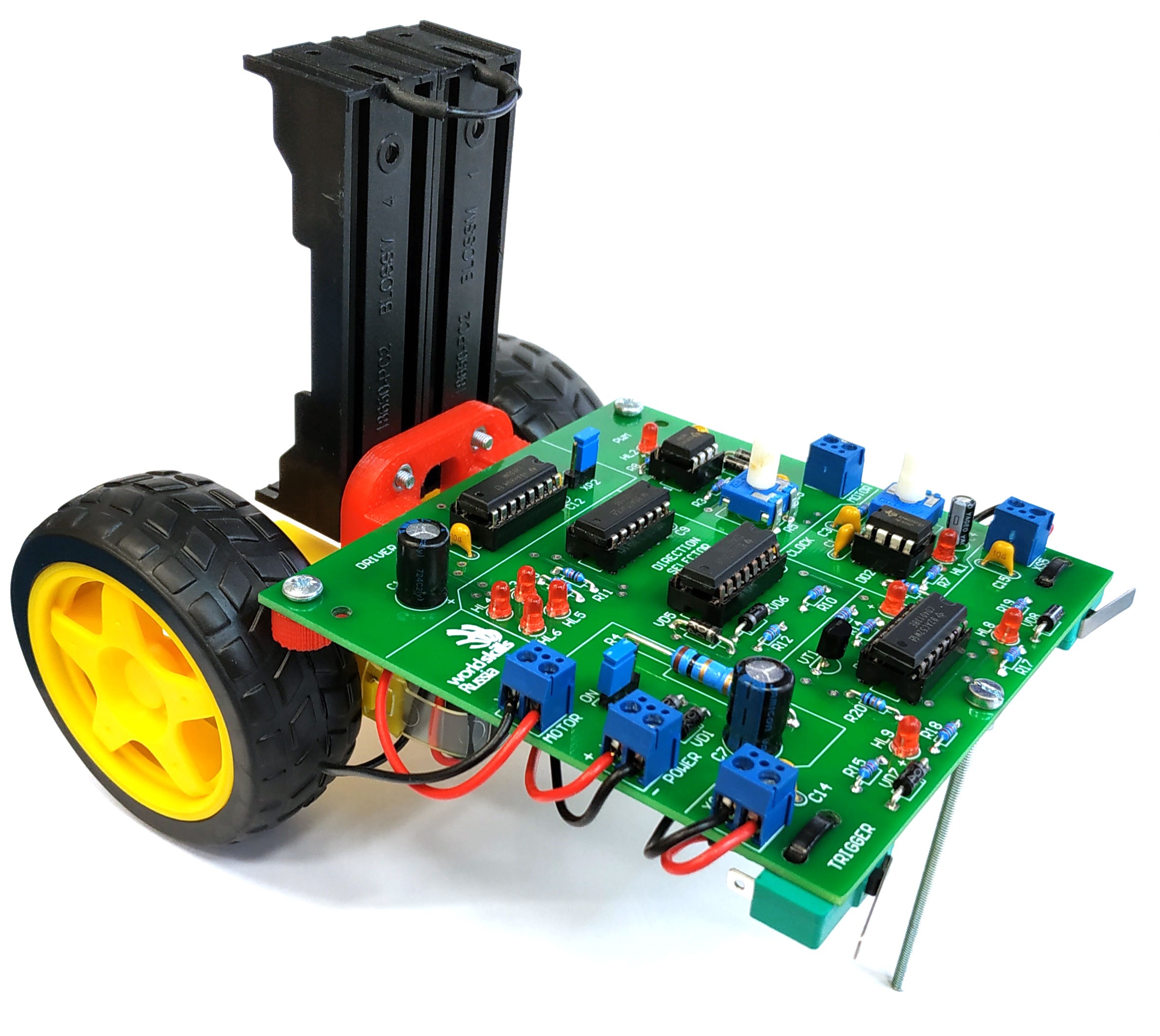
Общий вид робота-жука мини
Принципиальная схема
Картинка кликабельна:
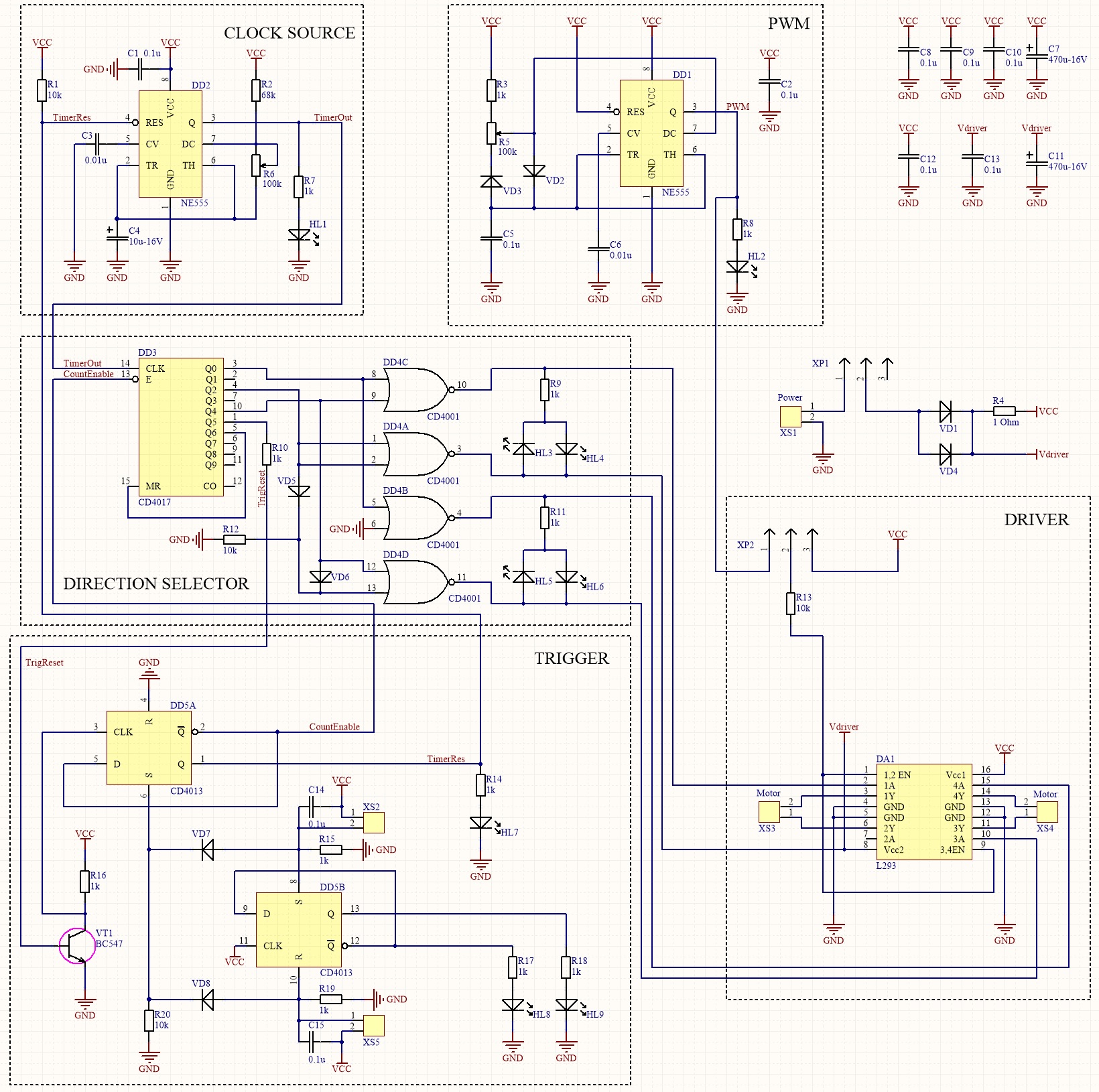
Принципиальная схема робота-жука
Питание подключается к разъему XS1 и может быть отключено джампером на разъеме XP1. Все движение управляется в первую очередь с триггера на микросхеме DD5A. В начальном состоянии его прямой выход установлен в ноль и комбинация сигналов на выходах микросхемы DD4 формирует набор состояний, при котором оба двигателя вращаются вперед.
При замыкании любого из концевых выключателей, выход триггера устанавливается в единицу. Сигнал TimerRes запускает тактовый генератор CLOCK SOURCE, а сигнал CounterEnable разрешает работу счетчика DD3. С каждым тактом генератора изменяется состояние выходов счетчика и происходит изменение состояния выходов логических элементов таким образом, что выполняется последовательность действий: остановка -> движение назад -> остановка -> поворот -> остановка -> движение вперед.
В момент возобновления движения вперед, через транзистор VT1 происходит изменение состояние триггера. Тактовый генератор и триггер отключаются до повторного столкновения с препятствием.
Также в схеме присутствует блок PWM, выполненный по типовой схеме включения NE555 в режиме генератора ШИМ-сигнала. Это позволяет регулировать скорость вращения двигателей через специальный вход драйвера L293.
Сборочный чертеж
Плата разработана таким образом, что ее можно сделать односторонней. В этом случае достаточно будет установить несколько перемычек показанных на чертеже. Если плата двухсторонняя, то паять перемычки, конечно, не надо.
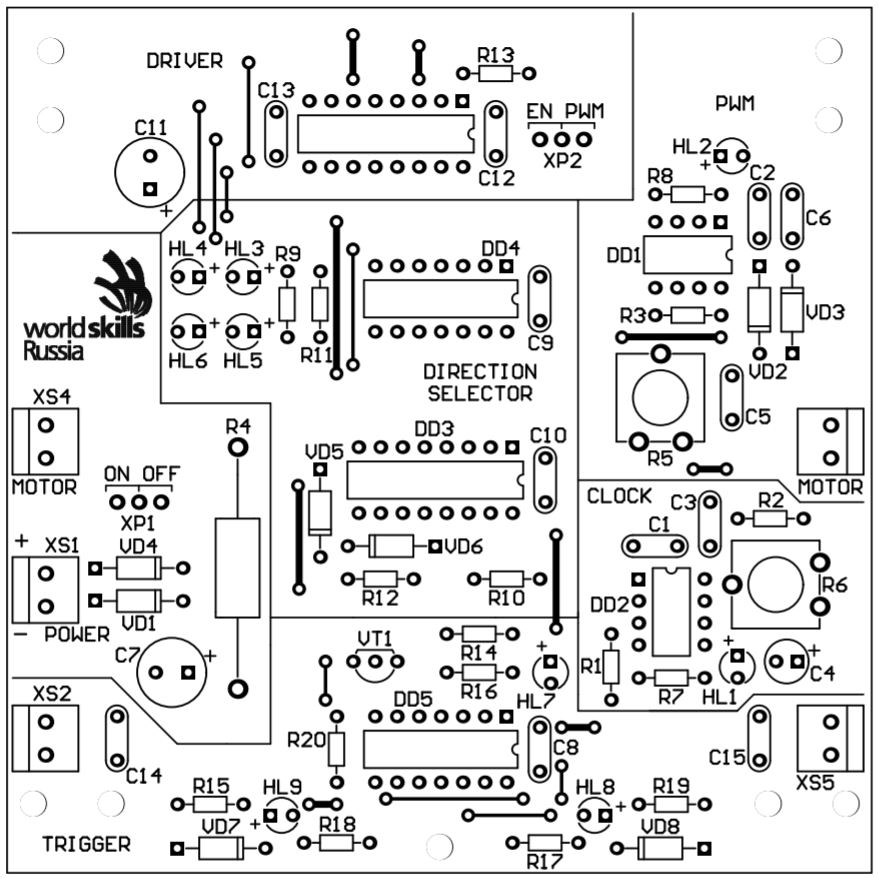
Робот-жук мини. Сборочный чертеж
В конце статьи можно найти гербер-файлы для изготовления двухсторонней печатной платы с маской и шелкографией, но ее также легко можно изготовить в домашних условиях в одностороннем варианте.
Список компонентов
Для сборки устройства потребуются следующие компоненты и материалы:
- R1,R12,R13,R20 — резисторы, MF-0.125-10k, 4шт
- R2 — резистор, MF-0.125-68k, 1шт
- R3,R7-R11,R14-R19 — резисторы, MF-0.125-1k, 12шт
- R4 — резистор, 1Вт, 1Ом, 1шт
- R5, R6 — резисторы подстроечные, CA9MV 100k, 2шт
- C1,C2,C5,C8-C10,C12-C15 — конденсаторы, X7R, 0.1uF, 10%, 50V, 10шт
- C3,C6 — конденсаторы, X7R, 0.01uF, 10%, 50V, 2шт
- C4 — конденсатор электролитический, 10uF-16V, 1шт
- C7,C11 — конденсаторы электролитические, 470uF-16V, 2шт
- DA1 — микросхема, DIP-16, L293DNE, 1шт
- DD1,DD2 — микросхемы, DIP-8, NE555P, 2шт
- DD3 — микросхема, DIP-16, CD4017BE, 1шт
- DD4 — микросхема, DIP-14, CD4001BE, 1шт
- DD5 — микросхема, DIP-14, CD4013BE, 1шт
- VD1-VD8 — диоды, 1N4004, 8шт
- VT1 — транзистор, TO-92, BC547BTA, 1шт
- HL1-HL9 — светодиоды, 3мм, FYL-3014ED1A, 9шт
- XP1,XP2 — вилка на плату, PLS-40, 6 контактов
- XS1-XS5 — клеммы, DG340-3.81-02P, 5шт
- Держатели батарей, LiIon, 18650, 2шт
- Микропереключатели, KMSW-12, 2шт
- Джамперы, 2.54, 2шт
- Панельки DIP-8, SCS-8, 2шт
- Панельки DIP-16, SCS-16, 2шт
- Панельки DIP-14, SCS-14, 2шт
- Ручки к CA9V, CA9MA5, 2шт
- Винт М3х60, 3шт
- Винт М3х8, 2шт
- Винт М3х10 с головкой в потай, 2шт
- Колеса, 2шт
- Двигатели с редукторами, 2шт
- Печатная плата, 1шт (ссылка на скачивания гербер-файлов в конце статьи)
- Держатель двигателей (ссылка на скачивания stl-модели будет в конце статьи)
- Термоусадочная трубка, монтажный провод, кабельные стяжки
Сборка и настройка устройства
Вот так выглядит печатная плата полностью собранного устройства:
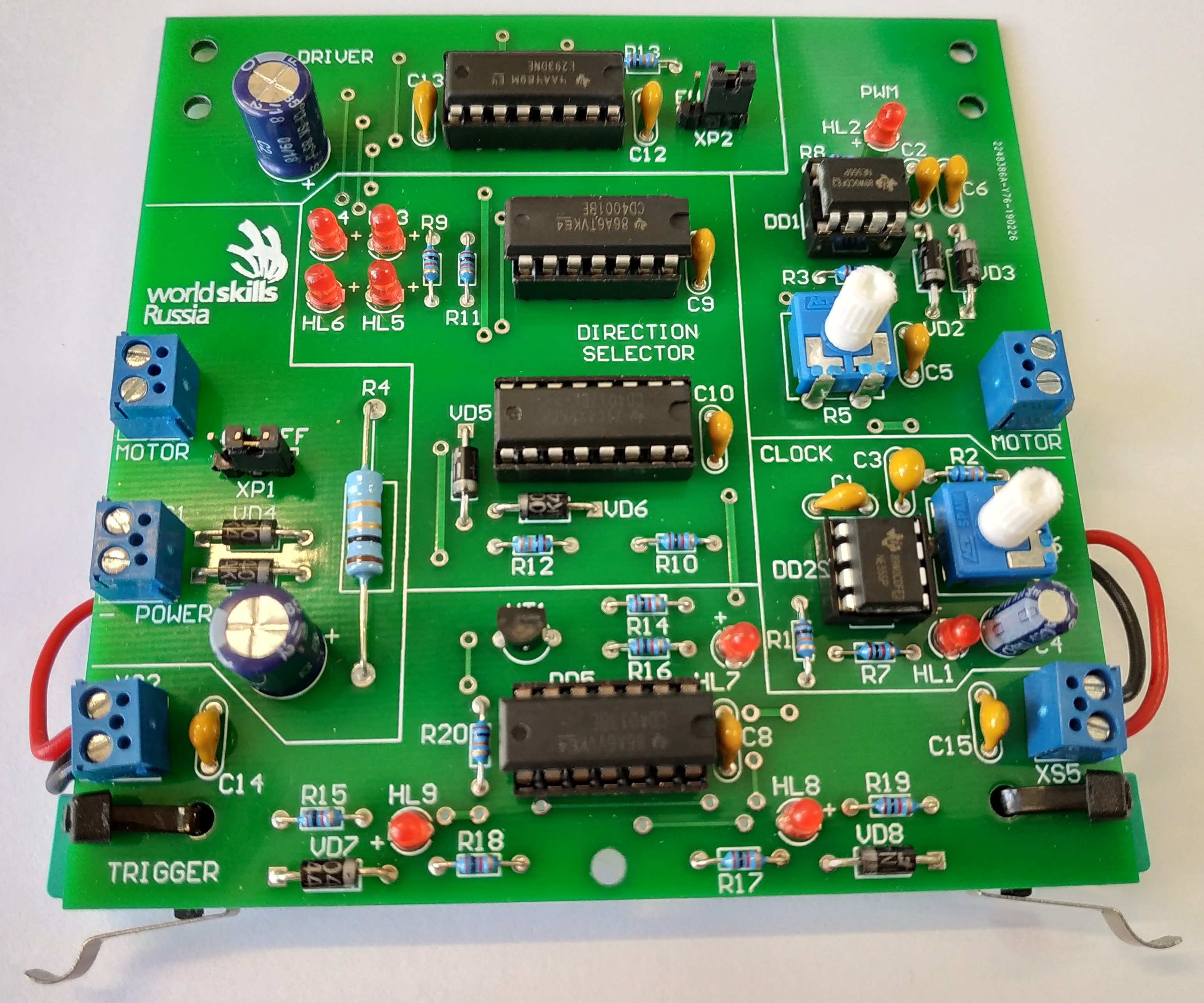
Робот-жук мини. Печатная плата с лицевой стороны
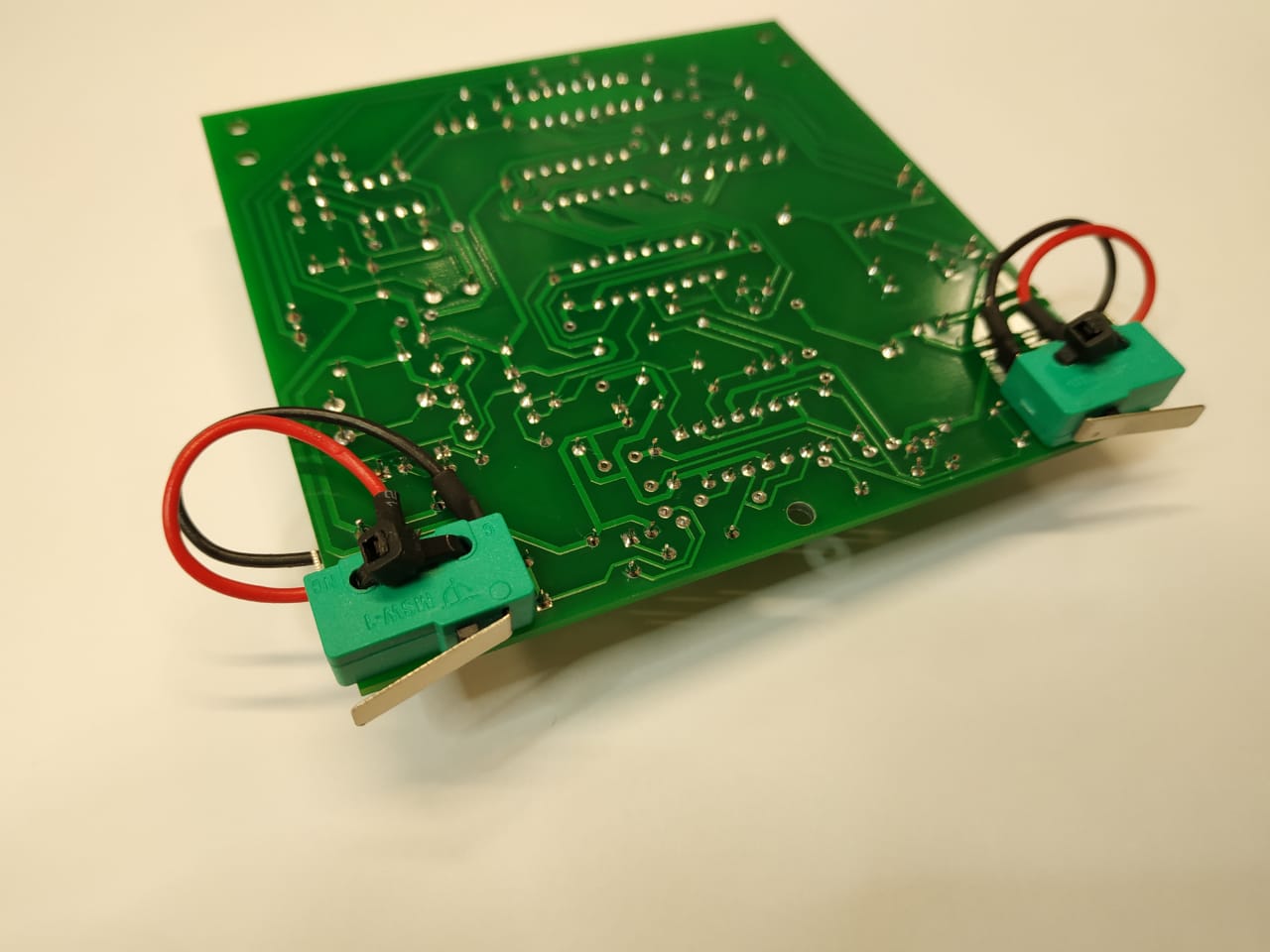
Робот-жук мини. Печатная плата с обратной стороны
Очень скоро мы добавим более подробные инструкции по механической сборке устройства с фотографиями. Для этого потребуется указанный в списке крепеж и одна немного печати на 3D-принтере.
Ссылки для скачивания
Исходные файлы для сборки устройства можно скачать по ссылкам ниже:
Гербер-файлы для изготовления печатной платы
STL-модель для изготовления держателя двигателей и батарей